 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-driven Step-to-step Dynamics based Adaptive Control for Robust and Versatile Underactuated Bipedal Robotic Walking
Paper and Code
Sep 18, 2022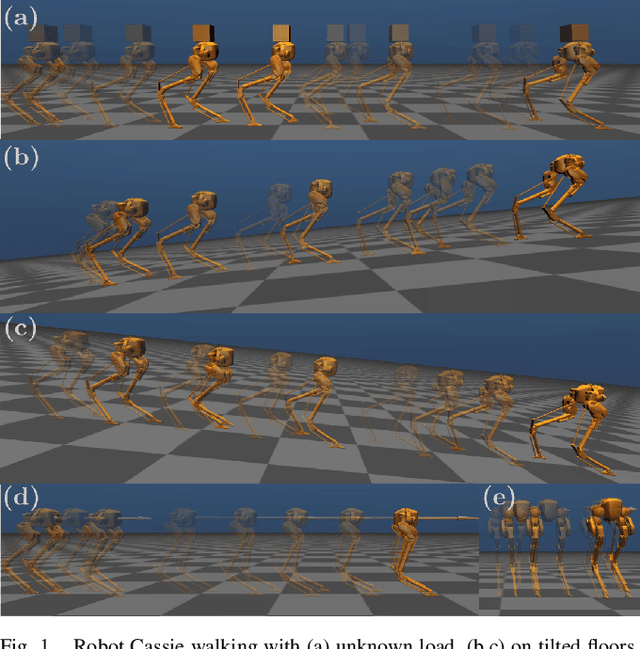
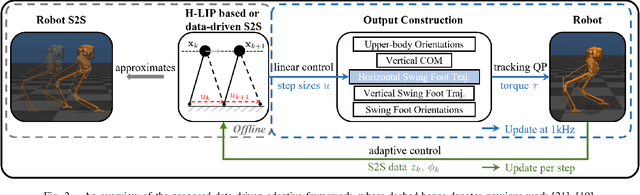
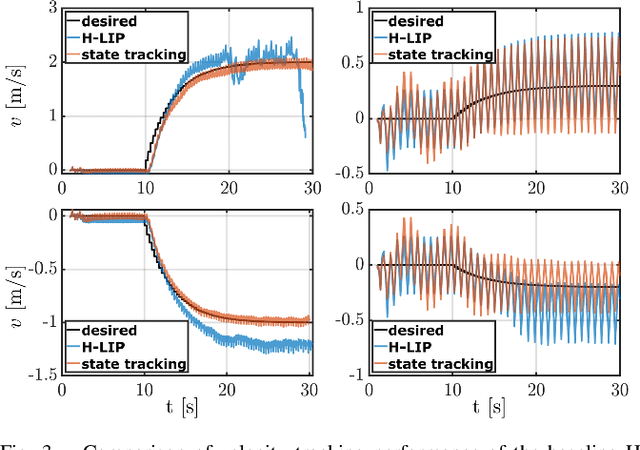
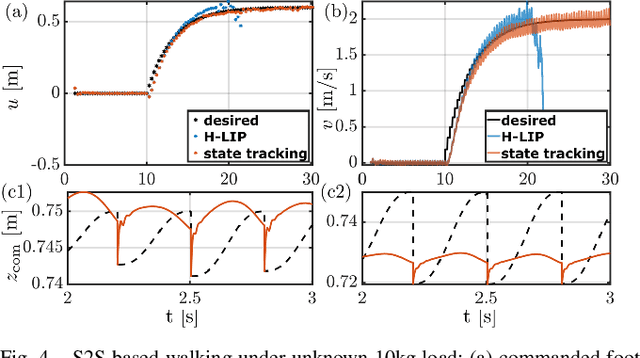
This paper presents a framework for synthesizing bipedal robotic walking that adapts to unknown environment and dynamics error via a data-driven step-to-step (S2S) dynamics model. We begin by synthesizing an S2S controller that stabilizes the walking using foot placement through nominal S2S dynamics from the hybrid linear inverted pendulum (H-LIP) model. Next, a data-driven representation of the S2S dynamics of the robot is learned online via classical adaptive control methods. The desired discrete foot placement on the robot is thereby realized by proper continuous output synthesis capturing the data-driven S2S controller coupled with a low-level tracking controller. The proposed approach is implemented in simulation on an underactuated 3D bipedal robot, Cassie, and improved reference velocity tracking is demonstrated. The proposed approach is also able to realize walking behavior that is robustly adaptive to unknown loads, inaccurate robot models, external disturbance forces, biased velocity estimation, and unknown slopes.