 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRPC: A Modular Framework for Robot Planning, Control, and Deployment
Sep 16, 2024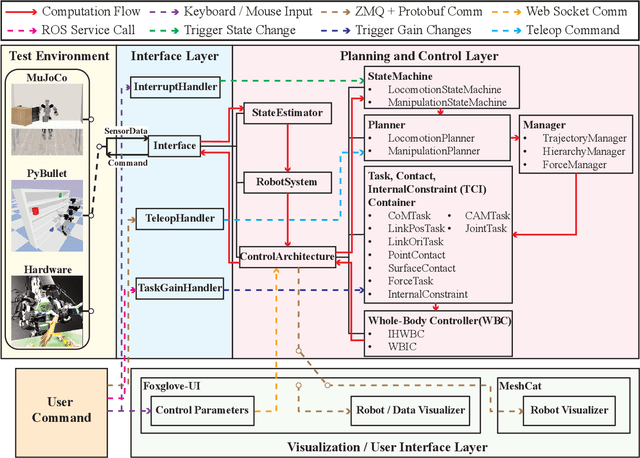
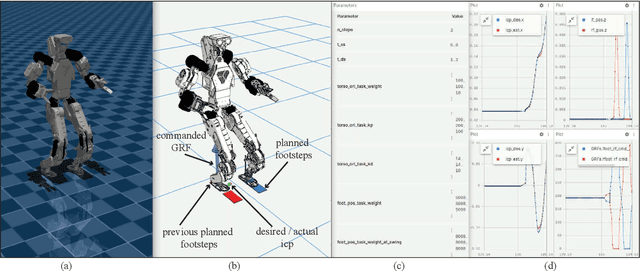
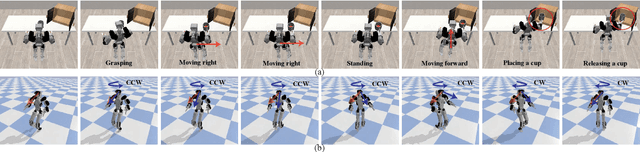
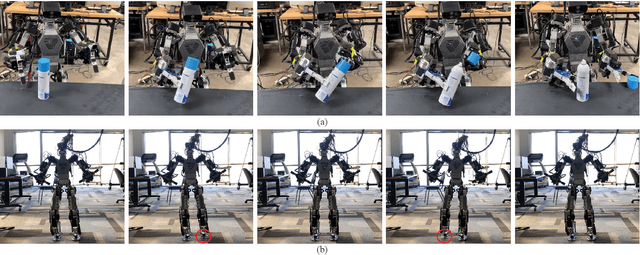
This paper presents an open-source, lightweight, yet comprehensive software framework, named RPC, which integrates physics-based simulators, planning and control libraries, debugging tools, and a user-friendly operator interface. RPC enables users to thoroughly evaluate and develop control algorithms for robotic systems. While existing software frameworks provide some of these capabilities, integrating them into a cohesive system can be challenging and cumbersome. To overcome this challenge, we have modularized each component in RPC to ensure easy and seamless integration or replacement with new modules. Additionally, our framework currently supports a variety of model-based planning and control algorithms for robotic manipulators and legged robots, alongside essential debugging tools, making it easier for users to design and execute complex robotics tasks. The code and usage instructions of RPC are available at https://github.com/shbang91/rpc.
RL-augmented MPC Framework for Agile and Robust Bipedal Footstep Locomotion Planning and Control
Jul 25, 2024This paper proposes an online bipedal footstep planning strategy that combines model predictive control (MPC) and reinforcement learning (RL) to achieve agile and robust bipedal maneuvers. While MPC-based foot placement controllers have demonstrated their effectiveness in achieving dynamic locomotion, their performance is often limited by the use of simplified models and assumptions. To address this challenge, we develop a novel foot placement controller that leverages a learned policy to bridge the gap between the use of a simplified model and the more complex full-order robot system. Specifically, our approach employs a unique combination of an ALIP-based MPC foot placement controller for sub-optimal footstep planning and the learned policy for refining footstep adjustments, enabling the resulting footstep policy to capture the robot's whole-body dynamics effectively. This integration synergizes the predictive capability of MPC with the flexibility and adaptability of RL. We validate the effectiveness of our framework through a series of experiments using the full-body humanoid robot DRACO 3. The results demonstrate significant improvements in dynamic locomotion performance, including better tracking of a wide range of walking speeds, enabling reliable turning and traversing challenging terrains while preserving the robustness and stability of the walking gaits compared to the baseline ALIP-based MPC approach.
Variable Inertia Model Predictive Control for Fast Bipedal Maneuvers
Jul 23, 2024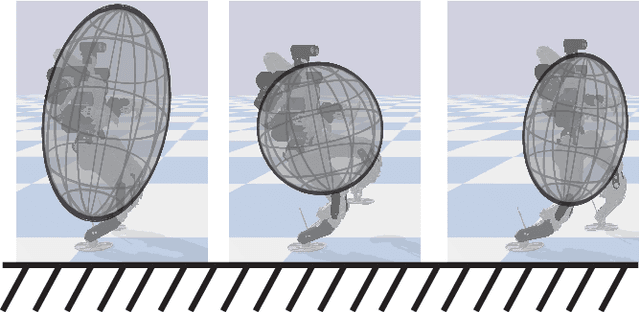
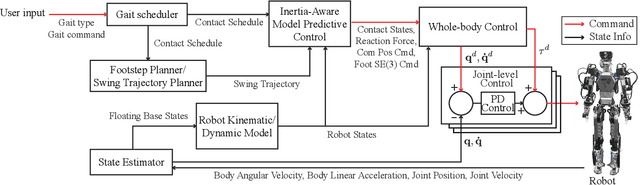
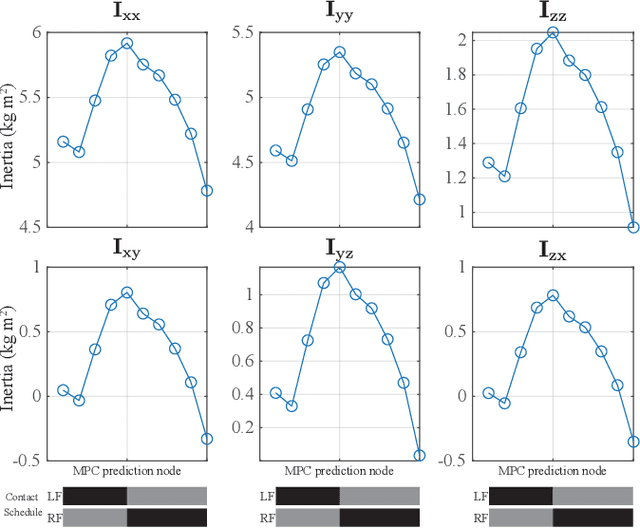
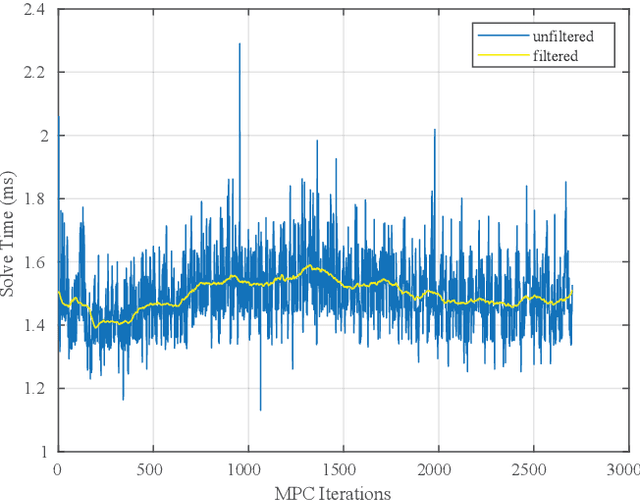
This paper proposes a novel control framework for agile and robust bipedal locomotion, addressing model discrepancies between full-body and reduced-order models. Specifically, assumptions such as constant centroidal inertia have introduced significant challenges and limitations in locomotion tasks. To enhance the agility and versatility of full-body humanoid robots, we formalize a Model Predictive Control (MPC) problem that accounts for the variable centroidal inertia of humanoid robots within a convex optimization framework, ensuring computational efficiency for real-time operations. In this formulation, we incorporate a centroidal inertia network designed to predict the variable centroidal inertia over the MPC horizon, taking into account the swing foot trajectories-an aspect often overlooked in ROM-based MPC frameworks. Moreover, we enhance the performance and stability of locomotion behaviors by synergizing the MPC-based approach with whole-body control (WBC). The effectiveness of our proposed framework is validated through simulations using our full-body humanoid robot, DRACO 3, demonstrating dynamic behaviors.
Deep Imitation Learning for Humanoid Loco-manipulation through Human Teleoperation
Sep 05, 2023



We tackle the problem of developing humanoid loco-manipulation skills with deep imitation learning. The difficulty of collecting task demonstrations and training policies for humanoids with a high degree of freedom presents substantial challenges. We introduce TRILL, a data-efficient framework for training humanoid loco-manipulation policies from human demonstrations. In this framework, we collect human demonstration data through an intuitive Virtual Reality (VR) interface. We employ the whole-body control formulation to transform task-space commands by human operators into the robot's joint-torque actuation while stabilizing its dynamics. By employing high-level action abstractions tailored for humanoid loco-manipulation, our method can efficiently learn complex sensorimotor skills. We demonstrate the effectiveness of TRILL in simulation and on a real-world robot for performing various loco-manipulation tasks. Videos and additional materials can be found on the project page: https://ut-austin-rpl.github.io/TRILL.
Control and Evaluation of a Humanoid Robot with Rolling Contact Knees
Oct 03, 2022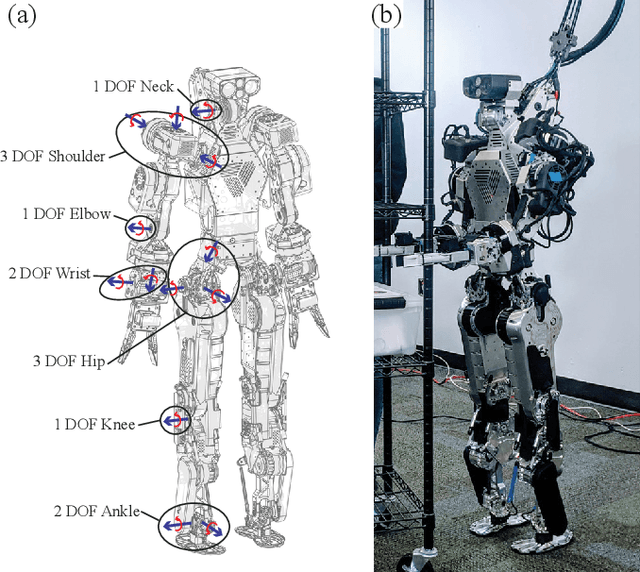
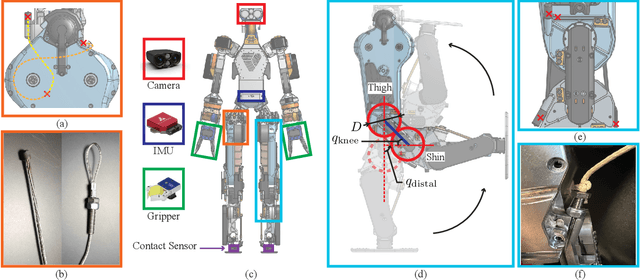
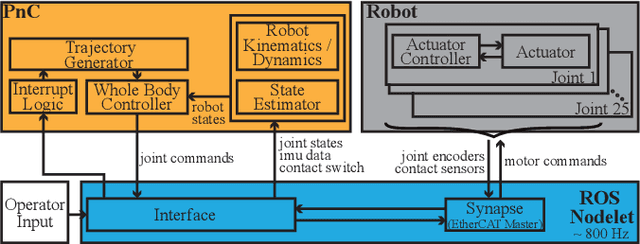
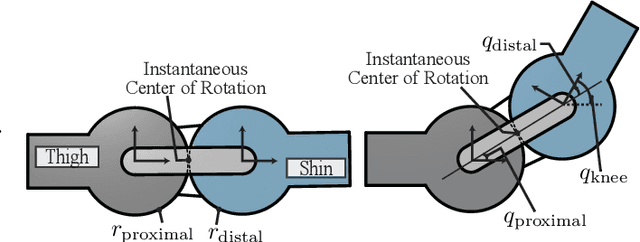
In this paper, we introduce the humanoid robot DRACO 3 by providing a high-level description of its design and control. This robot features proximal actuation and mechanical artifacts to provide a high range of hip, knee and ankle motion. Its versatile design brings interesting problems as it requires a more elaborate control system to perform its motions. For this reason, we introduce a whole body controller (WBC) with support for rolling contact joints and show how it can be easily integrated into our previously presented open-source Planning and Control (PnC) framework. We then validate our controller experimentally on DRACO 3 by showing preliminary results carrying out two postural tasks. Lastly, we analyze the impact of the proximal actuation design and show where it stands in comparison to other adult-size humanoids.
Data-Driven Safety Verification for Legged Robots
Feb 24, 2022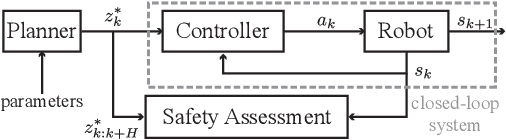
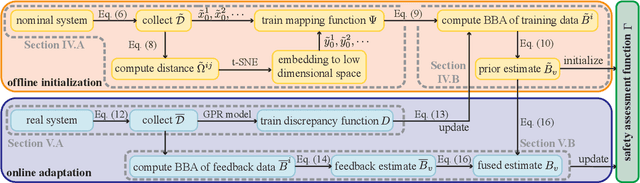
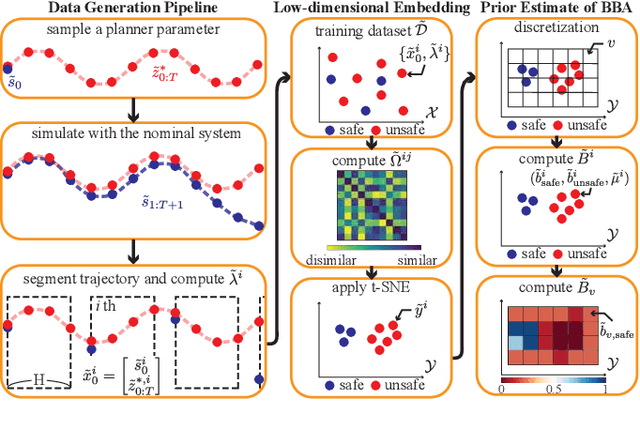

Planning safe motions for legged robots requires sophisticated safety verification tools. However, designing such tools for such complex systems is challenging due to the nonlinear and high-dimensional nature of these systems' dynamics. In this letter, we present a probabilistic verification framework for legged systems, which evaluates the safety of planned trajectories by learning an assessment function from trajectories collected from a closed-loop system. Our approach does not require an analytic expression of the closed-loop dynamics, thus enabling safety verification of systems with complex models and controllers. Our framework consists of an offline stage that initializes a safety assessment function by simulating a nominal model and an online stage that adapts the function to address the sim-to-real gap. The performance of the proposed approach for safety verification is demonstrated using a quadruped balancing task and a humanoid reaching task. The results demonstrate that our framework accurately predicts the systems' safety both at the planning phase to generate robust trajectories and at execution phase to detect unexpected external disturbances.
MPC-Based Hierarchical Task Space Control of Underactuated and Constrained Robots for Execution of Multiple Tasks
Sep 13, 2020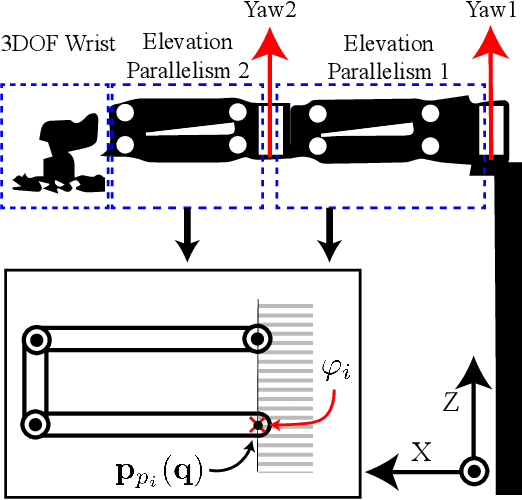
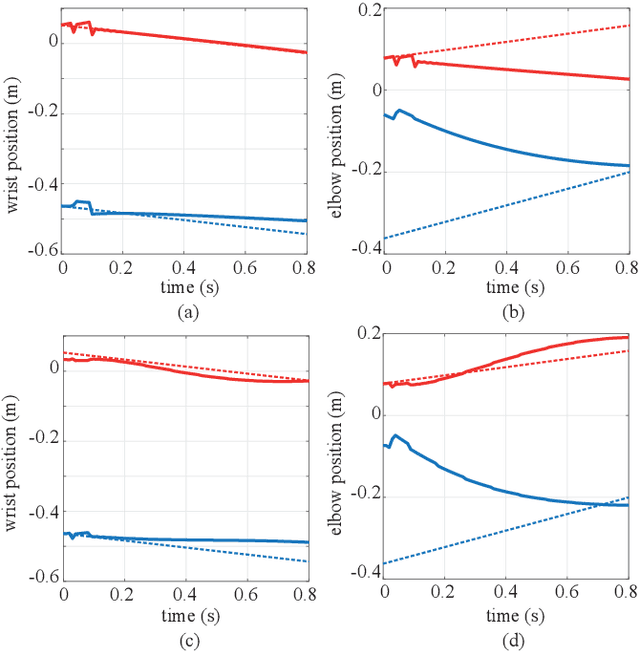
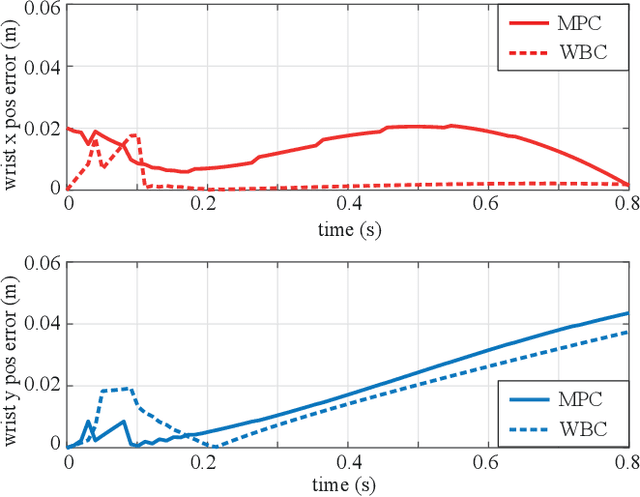
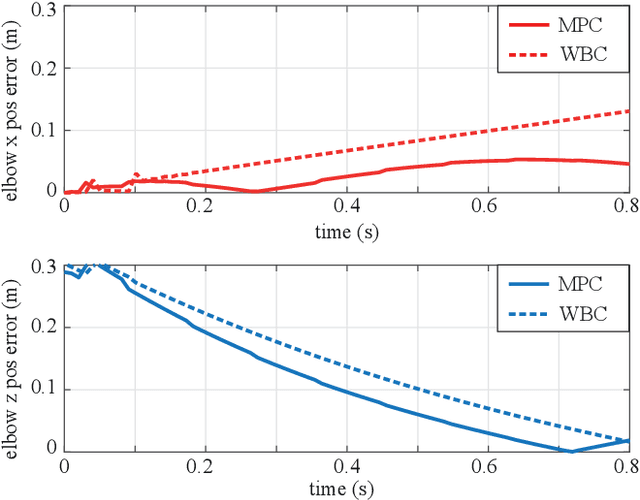
This paper proposes an MPC-based controller to efficiently execute multiple hierarchical tasks for underactuated and constrained robotic systems. Existing task-space controllers or whole-body controllers solve instantaneous optimization problems given task trajectories and the robot plant dynamics. However, the task-space control method we propose here relies on the prediction of future state trajectories and the corresponding costs-to-go terms over a finite time-horizon for computing control commands. We employ acceleration energy error as the performance index for the optimization problem and extend it over the finite-time horizon of our MPC. Our approach employs quadratically constrained quadratic programming, which includes quadratic constraints to handle multiple hierarchical tasks, and is computationally more efficient than nonlinear MPC-based approaches that rely on nonlinear programming. We validate our approach using numerical simulations of a new type of robot manipulator system, which contains underactuated and constrained mechanical structures.