 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCAIMAN: Causal Action Influence Detection for Sample Efficient Loco-manipulation
Feb 02, 2025Enabling legged robots to perform non-prehensile loco-manipulation with large and heavy objects is crucial for enhancing their versatility. However, this is a challenging task, often requiring sophisticated planning strategies or extensive task-specific reward shaping, especially in unstructured scenarios with obstacles. In this work, we present CAIMAN, a novel framework for learning loco-manipulation that relies solely on sparse task rewards. We leverage causal action influence to detect states where the robot is in control over other entities in the environment, and use this measure as an intrinsically motivated objective to enable sample-efficient learning. We employ a hierarchical control strategy, combining a low-level locomotion policy with a high-level policy that prioritizes task-relevant velocity commands. Through simulated and real-world experiments, including object manipulation with obstacles, we demonstrate the framework's superior sample efficiency, adaptability to diverse environments, and successful transfer to hardware without fine-tuning. The proposed approach paves the way for scalable, robust, and autonomous loco-manipulation in real-world applications.
Data-Driven Safety Verification for Legged Robots
Feb 24, 2022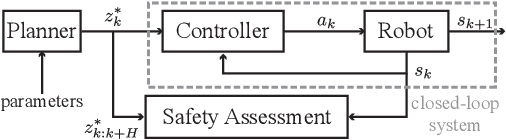
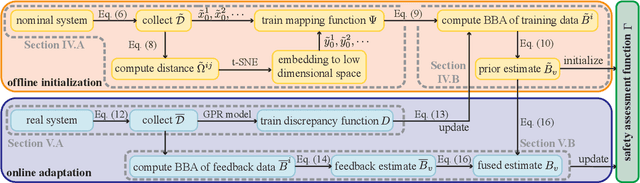
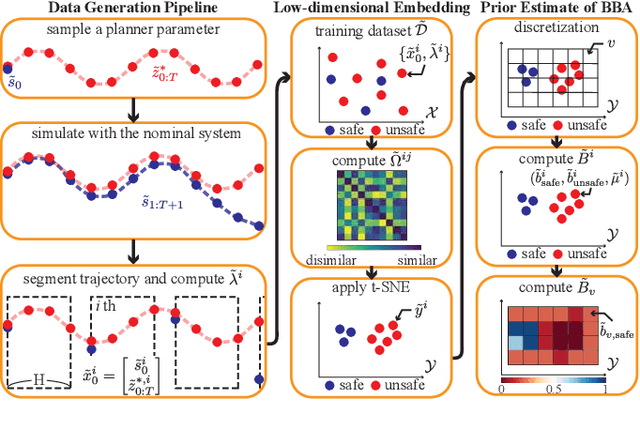

Planning safe motions for legged robots requires sophisticated safety verification tools. However, designing such tools for such complex systems is challenging due to the nonlinear and high-dimensional nature of these systems' dynamics. In this letter, we present a probabilistic verification framework for legged systems, which evaluates the safety of planned trajectories by learning an assessment function from trajectories collected from a closed-loop system. Our approach does not require an analytic expression of the closed-loop dynamics, thus enabling safety verification of systems with complex models and controllers. Our framework consists of an offline stage that initializes a safety assessment function by simulating a nominal model and an online stage that adapts the function to address the sim-to-real gap. The performance of the proposed approach for safety verification is demonstrated using a quadruped balancing task and a humanoid reaching task. The results demonstrate that our framework accurately predicts the systems' safety both at the planning phase to generate robust trajectories and at execution phase to detect unexpected external disturbances.