 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl and Evaluation of a Humanoid Robot with Rolling Contact Knees
Paper and Code
Oct 03, 2022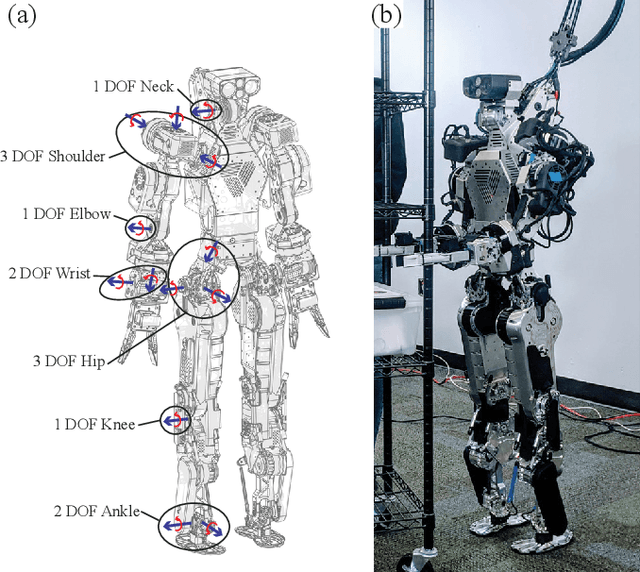
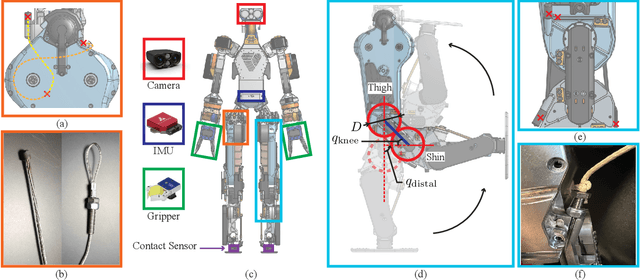
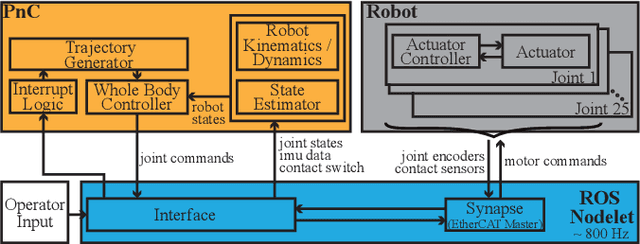
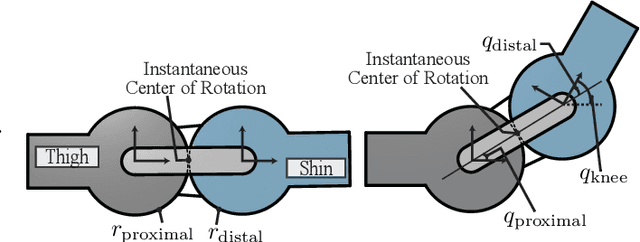
In this paper, we introduce the humanoid robot DRACO 3 by providing a high-level description of its design and control. This robot features proximal actuation and mechanical artifacts to provide a high range of hip, knee and ankle motion. Its versatile design brings interesting problems as it requires a more elaborate control system to perform its motions. For this reason, we introduce a whole body controller (WBC) with support for rolling contact joints and show how it can be easily integrated into our previously presented open-source Planning and Control (PnC) framework. We then validate our controller experimentally on DRACO 3 by showing preliminary results carrying out two postural tasks. Lastly, we analyze the impact of the proximal actuation design and show where it stands in comparison to other adult-size humanoids.