 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePLATO Hand: Shaping Contact Behavior with Fingernails for Precise Manipulation
Feb 05, 2026We present the PLATO Hand, a dexterous robotic hand with a hybrid fingertip that embeds a rigid fingernail within a compliant pulp. This design shapes contact behavior to enable diverse interaction modes across a range of object geometries. We develop a strain-energy-based bending-indentation model to guide the fingertip design and to explain how guided contact preserves local indentation while suppressing global bending. Experimental results show that the proposed robotic hand design demonstrates improved pinching stability, enhanced force observability, and successful execution of edge-sensitive manipulation tasks, including paper singulation, card picking, and orange peeling. Together, these results show that coupling structured contact geometry with a force-motion transparent mechanism provides a principled, physically embodied approach to precise manipulation.
RPC: A Modular Framework for Robot Planning, Control, and Deployment
Sep 16, 2024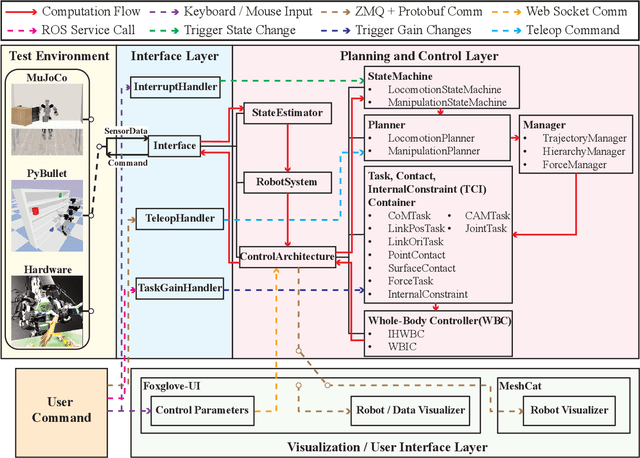
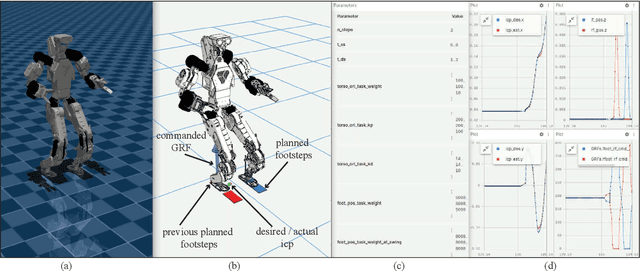
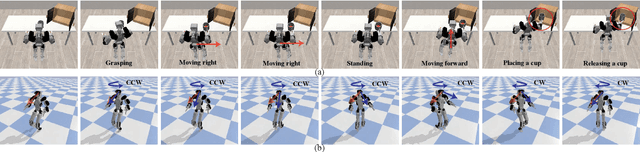
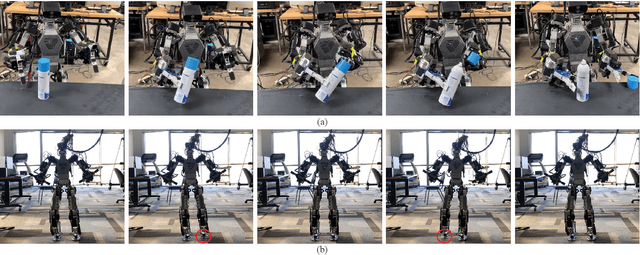
This paper presents an open-source, lightweight, yet comprehensive software framework, named RPC, which integrates physics-based simulators, planning and control libraries, debugging tools, and a user-friendly operator interface. RPC enables users to thoroughly evaluate and develop control algorithms for robotic systems. While existing software frameworks provide some of these capabilities, integrating them into a cohesive system can be challenging and cumbersome. To overcome this challenge, we have modularized each component in RPC to ensure easy and seamless integration or replacement with new modules. Additionally, our framework currently supports a variety of model-based planning and control algorithms for robotic manipulators and legged robots, alongside essential debugging tools, making it easier for users to design and execute complex robotics tasks. The code and usage instructions of RPC are available at https://github.com/shbang91/rpc.