 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMPC-Based Hierarchical Task Space Control of Underactuated and Constrained Robots for Execution of Multiple Tasks
Paper and Code
Sep 13, 2020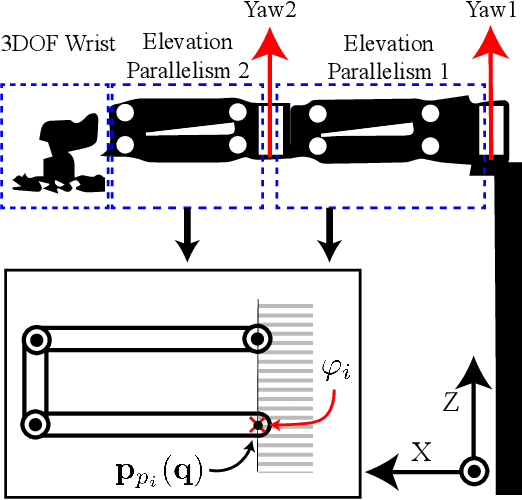
This paper proposes an MPC-based controller to efficiently execute multiple hierarchical tasks for underactuated and constrained robotic systems. Existing task-space controllers or whole-body controllers solve instantaneous optimization problems given task trajectories and the robot plant dynamics. However, the task-space control method we propose here relies on the prediction of future state trajectories and the corresponding costs-to-go terms over a finite time-horizon for computing control commands. We employ acceleration energy error as the performance index for the optimization problem and extend it over the finite-time horizon of our MPC. Our approach employs quadratically constrained quadratic programming, which includes quadratic constraints to handle multiple hierarchical tasks, and is computationally more efficient than nonlinear MPC-based approaches that rely on nonlinear programming. We validate our approach using numerical simulations of a new type of robot manipulator system, which contains underactuated and constrained mechanical structures.