 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinding Locomanipulation Plans Quickly in the Locomotion Constrained Manifold
Paper and Code
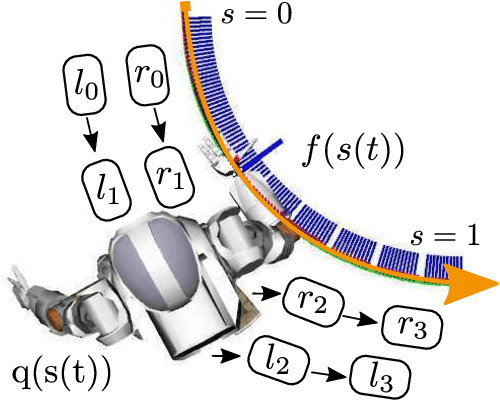
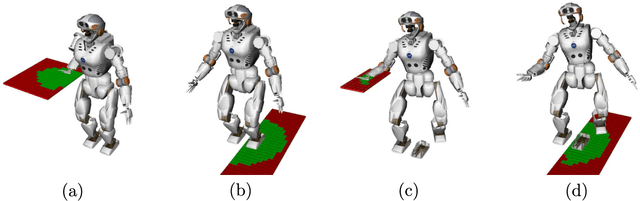
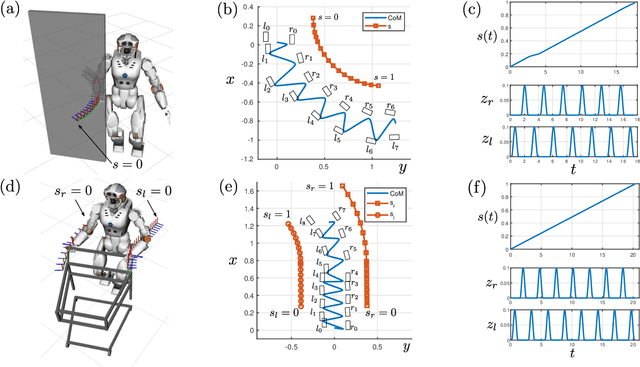
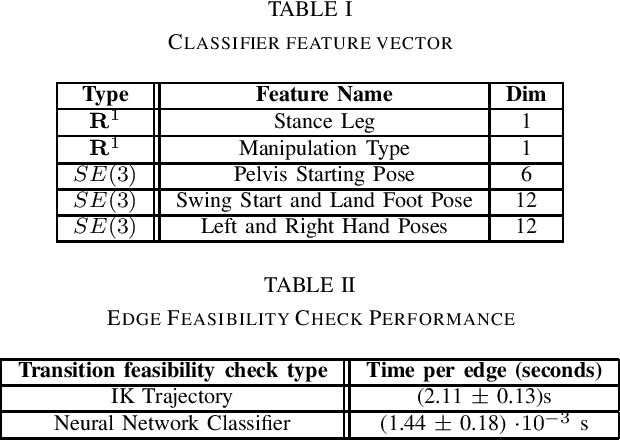
We present a method that finds locomanipulation plans that perform simultaneous locomotion and manipulation of objects for a desired end-effector trajectory. Key to our approach is to consider a generic locomotion constraint manifold that defines the locomotion scheme of the robot and then using this constraint manifold to search for admissible manipulation trajectories. The problem is formulated as a weighted-A* graph search whose planner output is a sequence of contact transitions and a path progression trajectory to construct the whole-body kinodynamic locomanipulation plan. We also provide a method for computing, visualizing and learning the locomanipulability region, which is used to efficiently evaluate the edge transition feasibility during the graph search. Experiments are performed on the NASA Valkyrie robot platform that utilizes a dynamic locomotion approach, called the divergent-component-of-motion (DCM), on two example locomanipulation scenarios.