 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrasp Control of a Cable-Driven Robotic Hand Using a PVDF Slip Detection Sensor
Paper and Code
Feb 12, 2022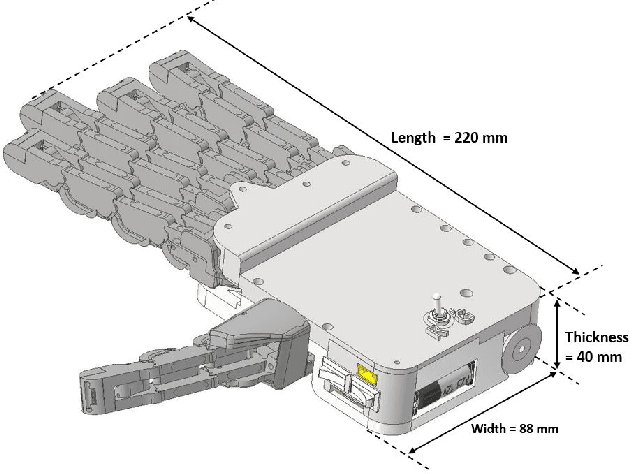
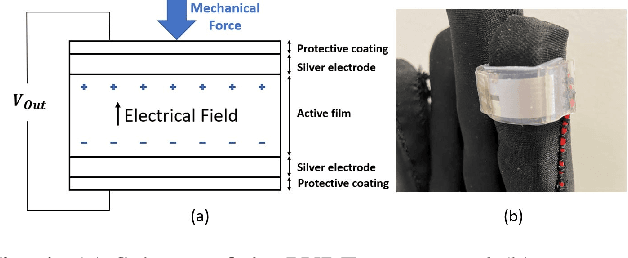
Detecting and preventing slip is a major challenge in robotic hand operation, underpinning the robot's ability to perform safe and reliable grasps. Using the robotic hand design from the authors' earlier work, a sensing and control strategy is proposed here to prevent object slippage. The robotic hand is cable-driven, single-actuated, has five fingers, and is capable of replicating most human hand motions. The slip sensing approach utilizes a piezoelectric vibration sensor, namely, polyvinylidene fluoride (PVDF), which is a flexible, thin, cheap, and highly sensitive material. The power of the filtered PVDF signal is shown to exhibit identifiable signatures during slip, thus providing a suitable slip detection mechanism. Using the PVDF feedback, an integral controller is implemented to prevent the grasped object from falling and ensure a safe, powerful, and reliable grasp. The extension movement of the robotic hand is controlled using a bend sensor, through a proportional-integral (PI) controller. The robotic hand weights 338 gr. The functionality and robustness of the proposed slip-detection sensory system and control logic implementation are evaluated through experiments.