 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollision Avoidance and Geofencing for Fixed-wing Aircraft with Control Barrier Functions
Mar 07, 2024



Safety-critical failures often have fatal consequences in aerospace control. Control systems on aircraft, therefore, must ensure the strict satisfaction of safety constraints, preferably with formal guarantees of safe behavior. This paper establishes the safety-critical control of fixed-wing aircraft in collision avoidance and geofencing tasks. A control framework is developed wherein a run-time assurance (RTA) system modulates the nominal flight controller of the aircraft whenever necessary to prevent it from colliding with other aircraft or crossing a boundary (geofence) in space. The RTA is formulated as a safety filter using control barrier functions (CBFs) with formal guarantees of safe behavior. CBFs are constructed and compared for a nonlinear kinematic fixed-wing aircraft model. The proposed CBF-based controllers showcase the capability of safely executing simultaneous collision avoidance and geofencing, as demonstrated by simulations on the kinematic model and a high-fidelity dynamical model.
The Supernumerary Robotic 3rd Thumb for Skilled Music Tasks
Aug 01, 2018
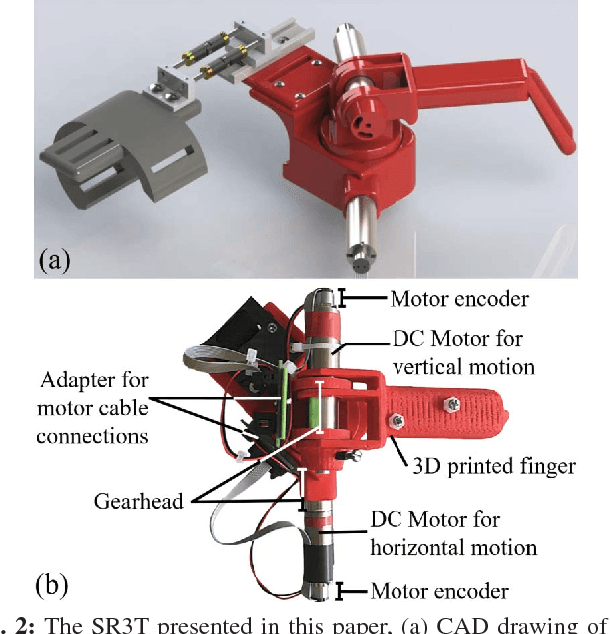
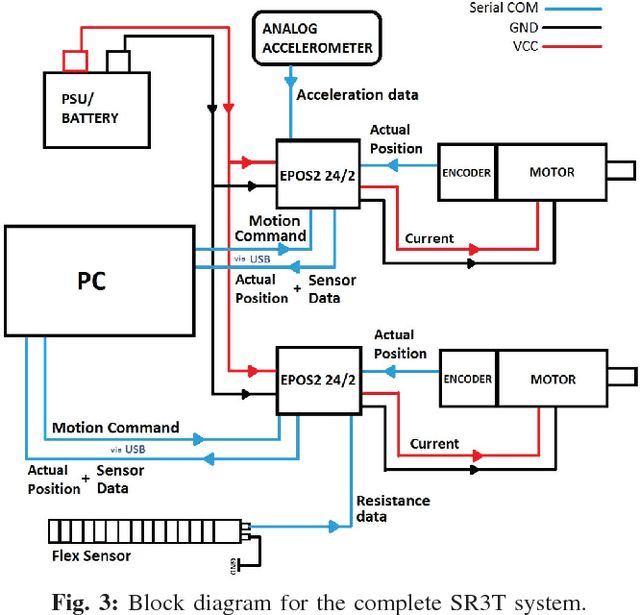
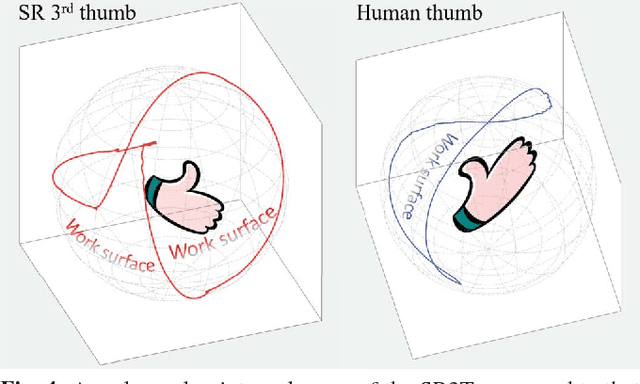
Wearable robotics bring the opportunity to augment human capability and performance, be it through prosthetics, exoskeletons, or supernumerary robotic limbs. The latter concept allows enhancing human performance and assisting them in daily tasks. An important research question is, however, whether the use of such devices can lead to their eventual cognitive embodiment, allowing the user to adapt to them and use them seamlessly as any other limb of their own. This paper describes the creation of a platform to investigate this. Our supernumerary robotic 3rd thumb was created to augment piano playing, allowing a pianist to press piano keys beyond their natural hand-span; thus leading to functional augmentation of their skills and the technical feasibility to play with 11 fingers. The robotic finger employs sensors, motors, and a human interfacing algorithm to control its movement in real-time. A proof of concept validation experiment has been conducted to show the effectiveness of the robotic finger in playing musical pieces on a grand piano, showing that naive users were able to use it for 11 finger play within a few hours.