 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph Neural Networks Uncover Geometric Neural Representations in Reinforcement-Based Motor Learning
Oct 31, 2024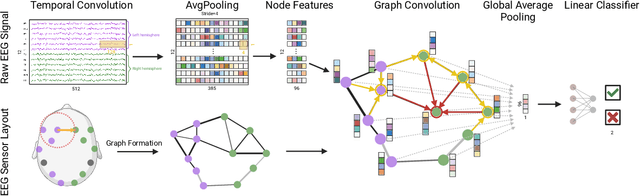

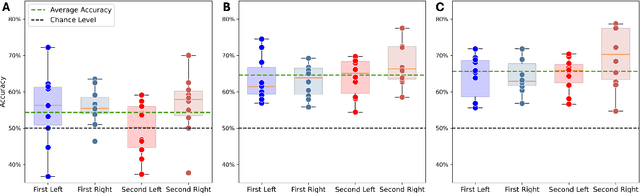
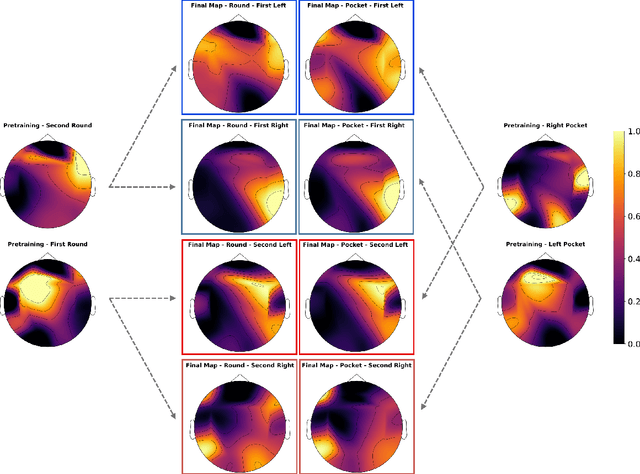
Graph Neural Networks (GNN) can capture the geometric properties of neural representations in EEG data. Here we utilise those to study how reinforcement-based motor learning affects neural activity patterns during motor planning, leveraging the inherent graph structure of EEG channels to capture the spatial relationships in brain activity. By exploiting task-specific symmetries, we define different pretraining strategies that not only improve model performance across all participant groups but also validate the robustness of the geometric representations. Explainability analysis based on the graph structures reveals consistent group-specific neural signatures that persist across pretraining conditions, suggesting stable geometric structures in the neural representations associated with motor learning and feedback processing. These geometric patterns exhibit partial invariance to certain task space transformations, indicating symmetries that enable generalisation across conditions while maintaining specificity to individual learning strategies. This work demonstrates how GNNs can uncover the effects of previous outcomes on motor planning, in a complex real-world task, providing insights into the geometric principles governing neural representations. Our experimental design bridges the gap between controlled experiments and ecologically valid scenarios, offering new insights into the organisation of neural representations during naturalistic motor learning, which may open avenues for exploring fundamental principles governing brain activity in complex tasks.
Offline Bayesian Aleatoric and Epistemic Uncertainty Quantification and Posterior Value Optimisation in Finite-State MDPs
Jun 04, 2024



We address the challenge of quantifying Bayesian uncertainty and incorporating it in offline use cases of finite-state Markov Decision Processes (MDPs) with unknown dynamics. Our approach provides a principled method to disentangle epistemic and aleatoric uncertainty, and a novel technique to find policies that optimise Bayesian posterior expected value without relying on strong assumptions about the MDP's posterior distribution. First, we utilise standard Bayesian reinforcement learning methods to capture the posterior uncertainty in MDP parameters based on available data. We then analytically compute the first two moments of the return distribution across posterior samples and apply the law of total variance to disentangle aleatoric and epistemic uncertainties. To find policies that maximise posterior expected value, we leverage the closed-form expression for value as a function of policy. This allows us to propose a stochastic gradient-based approach for solving the problem. We illustrate the uncertainty quantification and Bayesian posterior value optimisation performance of our agent in simple, interpretable gridworlds and validate it through ground-truth evaluations on synthetic MDPs. Finally, we highlight the real-world impact and computational scalability of our method by applying it to the AI Clinician problem, which recommends treatment for patients in intensive care units and has emerged as a key use case of finite-state MDPs with offline data. We discuss the challenges that arise with Bayesian modelling of larger scale MDPs while demonstrating the potential to apply our methods rooted in Bayesian decision theory into the real world. We make our code available at https://github.com/filippovaldettaro/finite-state-mdps .
The 'Sandwich' meta-framework for architecture agnostic deep privacy-preserving transfer learning for non-invasive brainwave decoding
Apr 10, 2024Machine learning has enhanced the performance of decoding signals indicating human behaviour. EEG decoding, as an exemplar indicating neural activity and human thoughts non-invasively, has been helpful in neural activity analysis and aiding patients via brain-computer interfaces. However, training machine learning algorithms on EEG encounters two primary challenges: variability across data sets and privacy concerns using data from individuals and data centres. Our objective is to address these challenges by integrating transfer learning for data variability and federated learning for data privacy into a unified approach. We introduce the Sandwich as a novel deep privacy-preserving meta-framework combining transfer learning and federated learning. The Sandwich framework comprises three components: federated networks (first layers) that handle data set differences at the input level, a shared network (middle layer) learning common rules and applying transfer learning, and individual classifiers (final layers) for specific tasks of each data set. It enables the central network (central server) to benefit from multiple data sets, while local branches (local servers) maintain data and label privacy. We evaluated the `Sandwich' meta-architecture in various configurations using the BEETL motor imagery challenge, a benchmark for heterogeneous EEG data sets. Compared with baseline models, our `Sandwich' implementations showed superior performance. The best-performing model, the Inception Sandwich with deep set alignment (Inception-SD-Deepset), exceeded baseline methods by 9%. The `Sandwich' framework demonstrates significant advancements in federated deep transfer learning for diverse tasks and data sets. It outperforms conventional deep learning methods, showcasing the potential for effective use of larger, heterogeneous data sets with enhanced privacy as a model-agnostic meta-framework.
Speaker-Independent Dysarthria Severity Classification using Self-Supervised Transformers and Multi-Task Learning
Feb 29, 2024



Dysarthria, a condition resulting from impaired control of the speech muscles due to neurological disorders, significantly impacts the communication and quality of life of patients. The condition's complexity, human scoring and varied presentations make its assessment and management challenging. This study presents a transformer-based framework for automatically assessing dysarthria severity from raw speech data. It can offer an objective, repeatable, accessible, standardised and cost-effective and compared to traditional methods requiring human expert assessors. We develop a transformer framework, called Speaker-Agnostic Latent Regularisation (SALR), incorporating a multi-task learning objective and contrastive learning for speaker-independent multi-class dysarthria severity classification. The multi-task framework is designed to reduce reliance on speaker-specific characteristics and address the intrinsic intra-class variability of dysarthric speech. We evaluated on the Universal Access Speech dataset using leave-one-speaker-out cross-validation, our model demonstrated superior performance over traditional machine learning approaches, with an accuracy of $70.48\%$ and an F1 score of $59.23\%$. Our SALR model also exceeded the previous benchmark for AI-based classification, which used support vector machines, by $16.58\%$. We open the black box of our model by visualising the latent space where we can observe how the model substantially reduces speaker-specific cues and amplifies task-specific ones, thereby showing its robustness. In conclusion, SALR establishes a new benchmark in speaker-independent multi-class dysarthria severity classification using generative AI. The potential implications of our findings for broader clinical applications in automated dysarthria severity assessments.
Learning to Optimise Wind Farms with Graph Transformers
Nov 21, 2023This work proposes a novel data-driven model capable of providing accurate predictions for the power generation of all wind turbines in wind farms of arbitrary layout, yaw angle configurations and wind conditions. The proposed model functions by encoding a wind farm into a fully-connected graph and processing the graph representation through a graph transformer. The graph transformer surrogate is shown to generalise well and is able to uncover latent structural patterns within the graph representation of wind farms. It is demonstrated how the resulting surrogate model can be used to optimise yaw angle configurations using genetic algorithms, achieving similar levels of accuracy to industrially-standard wind farm simulation tools while only taking a fraction of the computational cost.
Physics-informed reinforcement learning via probabilistic co-adjustment functions
Sep 11, 2023Reinforcement learning of real-world tasks is very data inefficient, and extensive simulation-based modelling has become the dominant approach for training systems. However, in human-robot interaction and many other real-world settings, there is no appropriate one-model-for-all due to differences in individual instances of the system (e.g. different people) or necessary oversimplifications in the simulation models. This requires two approaches: 1. either learning the individual system's dynamics approximately from data which requires data-intensive training or 2. using a complete digital twin of the instances, which may not be realisable in many cases. We introduce two approaches: co-kriging adjustments (CKA) and ridge regression adjustment (RRA) as novel ways to combine the advantages of both approaches. Our adjustment methods are based on an auto-regressive AR1 co-kriging model that we integrate with GP priors. This yield a data- and simulation-efficient way of using simplistic simulation models (e.g., simple two-link model) and rapidly adapting them to individual instances (e.g., biomechanics of individual people). Using CKA and RRA, we obtain more accurate uncertainty quantification of the entire system's dynamics than pure GP-based and AR1 methods. We demonstrate the efficiency of co-kriging adjustment with an interpretable reinforcement learning control example, learning to control a biomechanical human arm using only a two-link arm simulation model (offline part) and CKA derived from a small amount of interaction data (on-the-fly online). Our method unlocks an efficient and uncertainty-aware way to implement reinforcement learning methods in real world complex systems for which only imperfect simulation models exist.
EEG Decoding for Datasets with Heterogenous Electrode Configurations using Transfer Learning Graph Neural Networks
Jun 20, 2023Brain-Machine Interfacing (BMI) has greatly benefited from adopting machine learning methods for feature learning that require extensive data for training, which are often unavailable from a single dataset. Yet, it is difficult to combine data across labs or even data within the same lab collected over the years due to the variation in recording equipment and electrode layouts resulting in shifts in data distribution, changes in data dimensionality, and altered identity of data dimensions. Our objective is to overcome this limitation and learn from many different and diverse datasets across labs with different experimental protocols. To tackle the domain adaptation problem, we developed a novel machine learning framework combining graph neural networks (GNNs) and transfer learning methodologies for non-invasive Motor Imagery (MI) EEG decoding, as an example of BMI. Empirically, we focus on the challenges of learning from EEG data with different electrode layouts and varying numbers of electrodes. We utilise three MI EEG databases collected using very different numbers of EEG sensors (from 22 channels to 64) and layouts (from custom layouts to 10-20). Our model achieved the highest accuracy with lower standard deviations on the testing datasets. This indicates that the GNN-based transfer learning framework can effectively aggregate knowledge from multiple datasets with different electrode layouts, leading to improved generalization in subject-independent MI EEG classification. The findings of this study have important implications for Brain-Computer-Interface (BCI) research, as they highlight a promising method for overcoming the limitations posed by non-unified experimental setups. By enabling the integration of diverse datasets with varying electrode layouts, our proposed approach can help advance the development and application of BMI technologies.
Towards AI-controlled FES-restoration of movements: Learning cycling stimulation pattern with reinforcement learning
Mar 22, 2023Functional electrical stimulation (FES) has been increasingly integrated with other rehabilitation devices, including robots. FES cycling is one of the common FES applications in rehabilitation, which is performed by stimulating leg muscles in a certain pattern. The appropriate pattern varies across individuals and requires manual tuning which can be time-consuming and challenging for the individual user. Here, we present an AI-based method for finding the patterns, which requires no extra hardware or sensors. Our method has two phases, starting with finding model-based patterns using reinforcement learning and detailed musculoskeletal models. The models, built using open-source software, can be customised through our automated script and can be therefore used by non-technical individuals without extra cost. Next, our method fine-tunes the pattern using real cycling data. We test our both in simulation and experimentally on a stationary tricycle. In the simulation test, our method can robustly deliver model-based patterns for different cycling configurations. The experimental evaluation shows that our method can find a model-based pattern that induces higher cycling speed than an EMG-based pattern. By using just 100 seconds of cycling data, our method can deliver a fine-tuned pattern that gives better cycling performance. Beyond FES cycling, this work is a showcase, displaying the feasibility and potential of human-in-the-loop AI in real-world rehabilitation.
Towards AI-controlled FES-restoration of arm movements: Controlling for progressive muscular fatigue with Gaussian state-space models
Jan 10, 2023Reaching disability limits an individual's ability in performing daily tasks. Surface Functional Electrical Stimulation (FES) offers a non-invasive solution to restore lost ability. However, inducing desired movements using FES is still an open engineering problem. This problem is accentuated by the complexities of human arms' neuromechanics and the variations across individuals. Reinforcement Learning (RL) emerges as a promising approach to govern customised control rules for different settings. Yet, one remaining challenge of controlling FES systems for RL is unobservable muscle fatigue that progressively changes as an unknown function of the stimulation, thereby breaking the Markovian assumption of RL. In this work, we present a method to address the unobservable muscle fatigue issue, allowing our RL controller to achieve higher control performances. Our method is based on a Gaussian State-Space Model (GSSM) that utilizes recurrent neural networks to learn Markovian state-spaces from partial observations. The GSSM is used as a filter that converts the observations into the state-space representation for RL to preserve the Markovian assumption. Here, we start with presenting the modification of the original GSSM to address an overconfident issue. We then present the interaction between RL and the modified GSSM, followed by the setup for FES control learning. We test our RL-GSSM system on a planar reaching setting in simulation using a detailed neuromechanical model. The results show that the GSSM can help improve the RL's control performance to the comparable level of the ideal case that the fatigue is observable.
Towards AI-controlled FES-restoration of arm movements: neuromechanics-based reinforcement learning for 3-D reaching
Jan 10, 2023Reaching disabilities affect the quality of life. Functional Electrical Stimulation (FES) can restore lost motor functions. Yet, there remain challenges in controlling FES to induce desired movements. Neuromechanical models are valuable tools for developing FES control methods. However, focusing on the upper extremity areas, several existing models are either overly simplified or too computationally demanding for control purposes. Besides the model-related issues, finding a general method for governing the control rules for different tasks and subjects remains an engineering challenge. Here, we present our approach toward FES-based restoration of arm movements to address those fundamental issues in controlling FES. Firstly, we present our surface-FES-oriented neuromechanical models of human arms built using well-accepted, open-source software. The models are designed to capture significant dynamics in FES controls with minimal computational cost. Our models are customisable and can be used for testing different control methods. Secondly, we present the application of reinforcement learning (RL) as a general method for governing the control rules. In combination, our customisable models and RL-based control method open the possibility of delivering customised FES controls for different subjects and settings with minimal engineering intervention. We demonstrate our approach in planar and 3D settings.