 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph Neural Networks Uncover Geometric Neural Representations in Reinforcement-Based Motor Learning
Paper and Code
Oct 31, 2024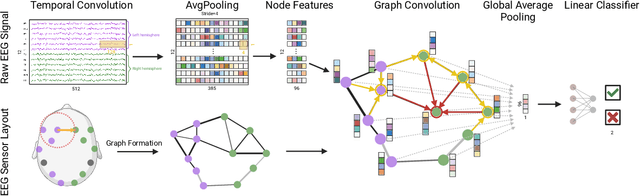

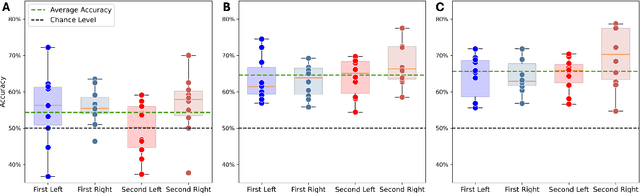
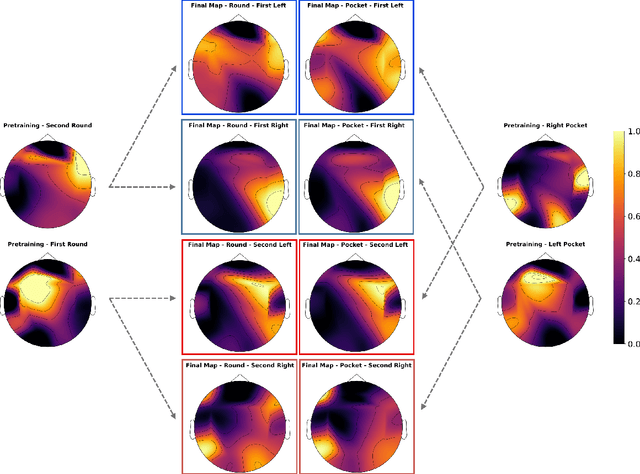
Graph Neural Networks (GNN) can capture the geometric properties of neural representations in EEG data. Here we utilise those to study how reinforcement-based motor learning affects neural activity patterns during motor planning, leveraging the inherent graph structure of EEG channels to capture the spatial relationships in brain activity. By exploiting task-specific symmetries, we define different pretraining strategies that not only improve model performance across all participant groups but also validate the robustness of the geometric representations. Explainability analysis based on the graph structures reveals consistent group-specific neural signatures that persist across pretraining conditions, suggesting stable geometric structures in the neural representations associated with motor learning and feedback processing. These geometric patterns exhibit partial invariance to certain task space transformations, indicating symmetries that enable generalisation across conditions while maintaining specificity to individual learning strategies. This work demonstrates how GNNs can uncover the effects of previous outcomes on motor planning, in a complex real-world task, providing insights into the geometric principles governing neural representations. Our experimental design bridges the gap between controlled experiments and ecologically valid scenarios, offering new insights into the organisation of neural representations during naturalistic motor learning, which may open avenues for exploring fundamental principles governing brain activity in complex tasks.