 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDisturbance-Robust Backup Control Barrier Functions: Safety Under Uncertain Dynamics
Paper and Code
Sep 12, 2024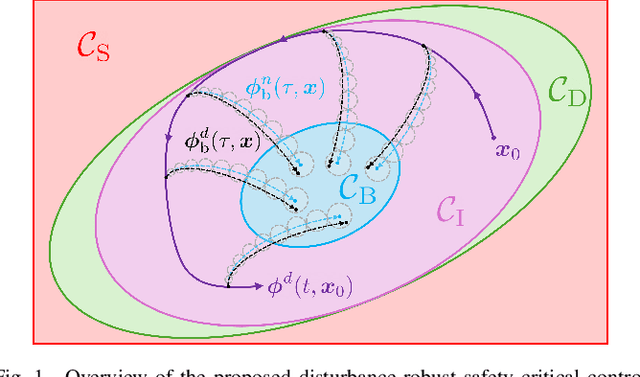
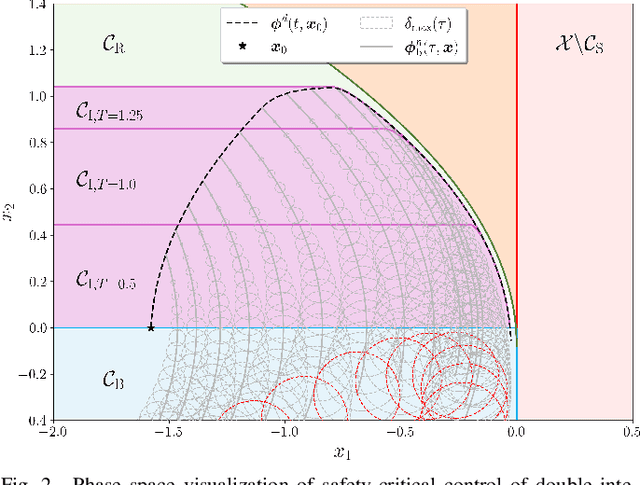
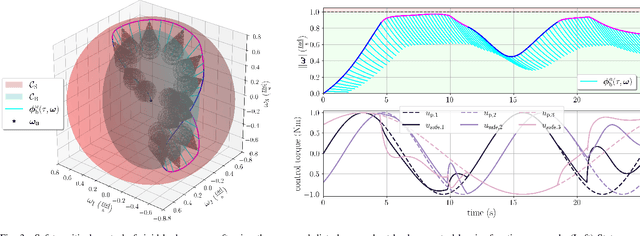
Obtaining a controlled invariant set is crucial for safety-critical control with control barrier functions (CBFs) but is non-trivial for complex nonlinear systems and constraints. Backup control barrier functions allow such sets to be constructed online in a computationally tractable manner by examining the evolution (or flow) of the system under a known backup control law. However, for systems with unmodeled disturbances, this flow cannot be directly computed, making the current methods inadequate for assuring safety in these scenarios. To address this gap, we leverage bounds on the nominal and disturbed flow to compute a forward invariant set online by ensuring safety of an expanding norm ball tube centered around the nominal system evolution. We prove that this set results in robust control constraints which guarantee safety of the disturbed system via our Disturbance-Robust Backup Control Barrier Function (DR-BCBF) solution. Additionally, the efficacy of the proposed framework is demonstrated in simulation, applied to a double integrator problem and a rigid body spacecraft rotation problem with rate constraints.