Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning for Safety-Critical Control with Control Barrier Functions
Paper and Code
Dec 20, 2019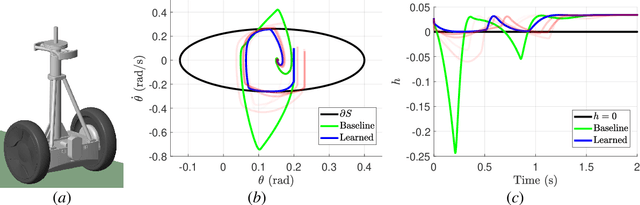
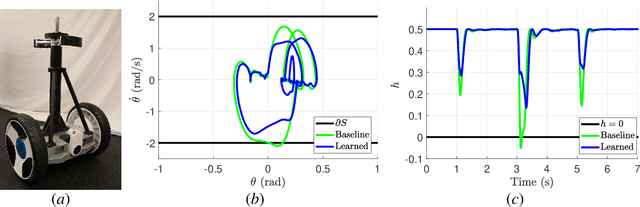
Modern nonlinear control theory seeks to endow systems with properties of stability and safety, and have been deployed successfully in multiple domains. Despite this success, model uncertainty remains a significant challenge in synthesizing safe controllers, leading to degradation in the properties provided by the controllers. This paper develops a machine learning framework utilizing Control Barrier Functions (CBFs) to reduce model uncertainty as it impact the safe behavior of a system. This approach iteratively collects data and updates a controller, ultimately achieving safe behavior. We validate this method in simulation and experimentally on a Segway platform.
* Extended version (12 Pages), Short version submitted to Learning for
Dynamics & Control (L4DC) 2020 Conference
View paper on
 OpenReview
OpenReview