Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Motion Planning for Multi-Modal Hybrid Locomotion
Paper and Code
Sep 23, 2019


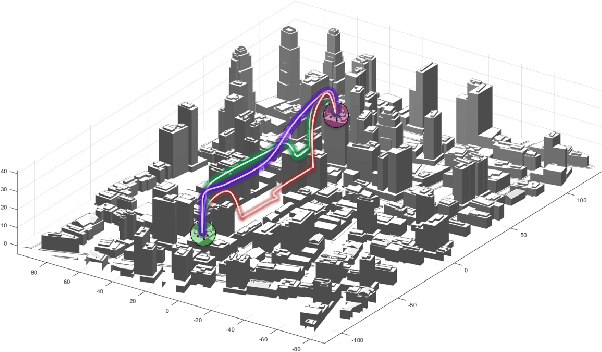
Hybrid locomotion, which combines multiple modalities of locomotion within a single robot, can enable robots to carry out complex tasks in diverse environments. This paper presents a novel method of combining graph search and trajectory optimization for planning multi-modal locomotion trajectories. We also introduce methods that allow the method to work tractably in higher dimensional state spaces. Through the examples of a hybrid double-integrator, amphibious robot, and the flying-driving drone, we show that our planner tractably gives full-state trajectories that are probabilistically optimal and dynamically feasible.
View paper on