 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlayWorld: Learning Robot World Models from Autonomous Play
Mar 11, 2026Action-conditioned video models offer a promising path to building general-purpose robot simulators that can improve directly from data. Yet, despite training on large-scale robot datasets, current state-of-the-art video models still struggle to predict physically consistent robot-object interactions that are crucial in robotic manipulation. To close this gap, we present PlayWorld, a simple, scalable, and fully autonomous pipeline for training high-fidelity video world simulators from interaction experience. In contrast to prior approaches that rely on success-biased human demonstrations, PlayWorld is the first system capable of learning entirely from unsupervised robot self-play, enabling naturally scalable data collection while capturing complex, long-tailed physical interactions essential for modeling realistic object dynamics. Experiments across diverse manipulation tasks show that PlayWorld generates high-quality, physically consistent predictions for contact-rich interactions that are not captured by world models trained on human-collected data. We further demonstrate the versatility of PlayWorld in enabling fine-grained failure prediction and policy evaluation, with up to 40% improvements over human-collected data. Finally, we demonstrate how PlayWorld enables reinforcement learning in the world model, improving policy performance by 65% in success rates when deployed in the real world.
Video Generation Models in Robotics -- Applications, Research Challenges, Future Directions
Jan 12, 2026Video generation models have emerged as high-fidelity models of the physical world, capable of synthesizing high-quality videos capturing fine-grained interactions between agents and their environments conditioned on multi-modal user inputs. Their impressive capabilities address many of the long-standing challenges faced by physics-based simulators, driving broad adoption in many problem domains, e.g., robotics. For example, video models enable photorealistic, physically consistent deformable-body simulation without making prohibitive simplifying assumptions, which is a major bottleneck in physics-based simulation. Moreover, video models can serve as foundation world models that capture the dynamics of the world in a fine-grained and expressive way. They thus overcome the limited expressiveness of language-only abstractions in describing intricate physical interactions. In this survey, we provide a review of video models and their applications as embodied world models in robotics, encompassing cost-effective data generation and action prediction in imitation learning, dynamics and rewards modeling in reinforcement learning, visual planning, and policy evaluation. Further, we highlight important challenges hindering the trustworthy integration of video models in robotics, which include poor instruction following, hallucinations such as violations of physics, and unsafe content generation, in addition to fundamental limitations such as significant data curation, training, and inference costs. We present potential future directions to address these open research challenges to motivate research and ultimately facilitate broader applications, especially in safety-critical settings.
VISTA: Open-Vocabulary, Task-Relevant Robot Exploration with Online Semantic Gaussian Splatting
Jul 01, 2025We present VISTA (Viewpoint-based Image selection with Semantic Task Awareness), an active exploration method for robots to plan informative trajectories that improve 3D map quality in areas most relevant for task completion. Given an open-vocabulary search instruction (e.g., "find a person"), VISTA enables a robot to explore its environment to search for the object of interest, while simultaneously building a real-time semantic 3D Gaussian Splatting reconstruction of the scene. The robot navigates its environment by planning receding-horizon trajectories that prioritize semantic similarity to the query and exploration of unseen regions of the environment. To evaluate trajectories, VISTA introduces a novel, efficient viewpoint-semantic coverage metric that quantifies both the geometric view diversity and task relevance in the 3D scene. On static datasets, our coverage metric outperforms state-of-the-art baselines, FisherRF and Bayes' Rays, in computation speed and reconstruction quality. In quadrotor hardware experiments, VISTA achieves 6x higher success rates in challenging maps, compared to baseline methods, while matching baseline performance in less challenging maps. Lastly, we show that VISTA is platform-agnostic by deploying it on a quadrotor drone and a Spot quadruped robot. Open-source code will be released upon acceptance of the paper.
SIREN: Semantic, Initialization-Free Registration of Multi-Robot Gaussian Splatting Maps
Feb 10, 2025



We present SIREN for registration of multi-robot Gaussian Splatting (GSplat) maps, with zero access to camera poses, images, and inter-map transforms for initialization or fusion of local submaps. To realize these capabilities, SIREN harnesses the versatility and robustness of semantics in three critical ways to derive a rigorous registration pipeline for multi-robot GSplat maps. First, SIREN utilizes semantics to identify feature-rich regions of the local maps where the registration problem is better posed, eliminating the need for any initialization which is generally required in prior work. Second, SIREN identifies candidate correspondences between Gaussians in the local maps using robust semantic features, constituting the foundation for robust geometric optimization, coarsely aligning 3D Gaussian primitives extracted from the local maps. Third, this key step enables subsequent photometric refinement of the transformation between the submaps, where SIREN leverages novel-view synthesis in GSplat maps along with a semantics-based image filter to compute a high-accuracy non-rigid transformation for the generation of a high-fidelity fused map. We demonstrate the superior performance of SIREN compared to competing baselines across a range of real-world datasets, and in particular, across the most widely-used robot hardware platforms, including a manipulator, drone, and quadruped. In our experiments, SIREN achieves about 90x smaller rotation errors, 300x smaller translation errors, and 44x smaller scale errors in the most challenging scenes, where competing methods struggle. We will release the code and provide a link to the project page after the review process.
A Survey on Uncertainty Quantification of Large Language Models: Taxonomy, Open Research Challenges, and Future Directions
Dec 07, 2024



The remarkable performance of large language models (LLMs) in content generation, coding, and common-sense reasoning has spurred widespread integration into many facets of society. However, integration of LLMs raises valid questions on their reliability and trustworthiness, given their propensity to generate hallucinations: plausible, factually-incorrect responses, which are expressed with striking confidence. Previous work has shown that hallucinations and other non-factual responses generated by LLMs can be detected by examining the uncertainty of the LLM in its response to the pertinent prompt, driving significant research efforts devoted to quantifying the uncertainty of LLMs. This survey seeks to provide an extensive review of existing uncertainty quantification methods for LLMs, identifying their salient features, along with their strengths and weaknesses. We present existing methods within a relevant taxonomy, unifying ostensibly disparate methods to aid understanding of the state of the art. Furthermore, we highlight applications of uncertainty quantification methods for LLMs, spanning chatbot and textual applications to embodied artificial intelligence applications in robotics. We conclude with open research challenges in uncertainty quantification of LLMs, seeking to motivate future research.
FAST-Splat: Fast, Ambiguity-Free Semantics Transfer in Gaussian Splatting
Nov 20, 2024We present FAST-Splat for fast, ambiguity-free semantic Gaussian Splatting, which seeks to address the main limitations of existing semantic Gaussian Splatting methods, namely: slow training and rendering speeds; high memory usage; and ambiguous semantic object localization. In deriving FAST-Splat , we formulate open-vocabulary semantic Gaussian Splatting as the problem of extending closed-set semantic distillation to the open-set (open-vocabulary) setting, enabling FAST-Splat to provide precise semantic object localization results, even when prompted with ambiguous user-provided natural-language queries. Further, by exploiting the explicit form of the Gaussian Splatting scene representation to the fullest extent, FAST-Splat retains the remarkable training and rendering speeds of Gaussian Splatting. Specifically, while existing semantic Gaussian Splatting methods distill semantics into a separate neural field or utilize neural models for dimensionality reduction, FAST-Splat directly augments each Gaussian with specific semantic codes, preserving the training, rendering, and memory-usage advantages of Gaussian Splatting over neural field methods. These Gaussian-specific semantic codes, together with a hash-table, enable semantic similarity to be measured with open-vocabulary user prompts and further enable FAST-Splat to respond with unambiguous semantic object labels and 3D masks, unlike prior methods. In experiments, we demonstrate that FAST-Splat is 4x to 6x faster to train with a 13x faster data pre-processing step, achieves between 18x to 75x faster rendering speeds, and requires about 3x smaller GPU memory, compared to the best-competing semantic Gaussian Splatting methods. Further, FAST-Splat achieves relatively similar or better semantic segmentation performance compared to existing methods. After the review period, we will provide links to the project website and the codebase.
DisCo: Distributed Contact-Rich Trajectory Optimization for Forceful Multi-Robot Collaboration
Oct 30, 2024



We present DisCo, a distributed algorithm for contact-rich, multi-robot tasks. DisCo is a distributed contact-implicit trajectory optimization algorithm, which allows a group of robots to optimize a time sequence of forces to objects and to their environment to accomplish tasks such as collaborative manipulation, robot team sports, and modular robot locomotion. We build our algorithm on a variant of the Alternating Direction Method of Multipliers (ADMM), where each robot computes its own contact forces and contact-switching events from a smaller single-robot, contact-implicit trajectory optimization problem, while cooperating with other robots through dual variables, enforcing constraints between robots. Each robot iterates between solving its local problem, and communicating over a wireless mesh network to enforce these consistency constraints with its neighbors, ultimately converging to a coordinated plan for the group. The local problems solved by each robot are significantly less challenging than a centralized problem with all robots' contact forces and switching events, improving the computational efficiency, while also preserving the privacy of some aspects of each robot's operation. We demonstrate the effectiveness of our algorithm in simulations of collaborative manipulation, multi-robot team sports scenarios, and in modular robot locomotion, where DisCo achieves $3$x higher success rates with a 2.5x to 5x faster computation time. Further, we provide results of hardware experiments on a modular truss robot, with three collaborating truss nodes planning individually while working together to produce a punctuated rolling-gate motion of the composite structure. Videos are available on the project page: https://disco-opt.github.io.
SAFER-Splat: A Control Barrier Function for Safe Navigation with Online Gaussian Splatting Maps
Sep 15, 2024SAFER-Splat (Simultaneous Action Filtering and Environment Reconstruction) is a real-time, scalable, and minimally invasive action filter, based on control barrier functions, for safe robotic navigation in a detailed map constructed at runtime using Gaussian Splatting (GSplat). We propose a novel Control Barrier Function (CBF) that not only induces safety with respect to all Gaussian primitives in the scene, but when synthesized into a controller, is capable of processing hundreds of thousands of Gaussians while maintaining a minimal memory footprint and operating at 15 Hz during online Splat training. Of the total compute time, a small fraction of it consumes GPU resources, enabling uninterrupted training. The safety layer is minimally invasive, correcting robot actions only when they are unsafe. To showcase the safety filter, we also introduce SplatBridge, an open-source software package built with ROS for real-time GSplat mapping for robots. We demonstrate the safety and robustness of our pipeline first in simulation, where our method is 20-50x faster, safer, and less conservative than competing methods based on neural radiance fields. Further, we demonstrate simultaneous GSplat mapping and safety filtering on a drone hardware platform using only on-board perception. We verify that under teleoperation a human pilot cannot invoke a collision. Our videos and codebase can be found at https://chengine.github.io/safer-splat.
Out-of-Distribution Runtime Adaptation with Conformalized Neural Network Ensembles
Jun 04, 2024

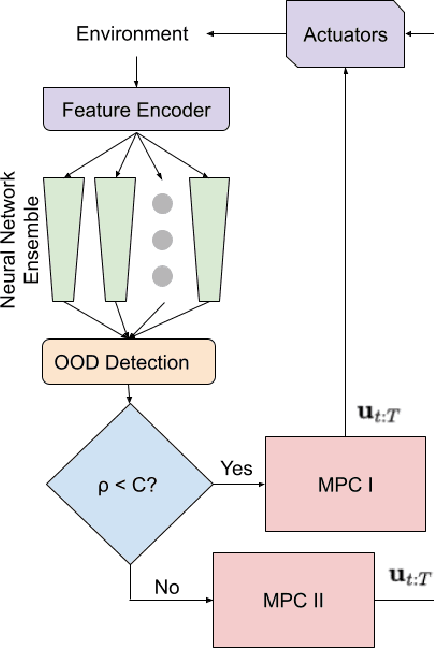

We present a method to integrate real-time out-of-distribution (OOD) detection for neural network trajectory predictors, and to adapt the control strategy of a robot (e.g., a self-driving car or drone) to preserve safety while operating in OOD regimes. Specifically, we use a neural network ensemble to predict the trajectory for a dynamic obstacle (such as a pedestrian), and use the maximum singular value of the empirical covariance among the ensemble as a signal for OOD detection. We calibrate this signal with a small fraction of held-out training data using the methodology of conformal prediction, to derive an OOD detector with probabilistic guarantees on the false-positive rate of the detector, given a user-specified confidence level. During in-distribution operation, we use an MPC controller to avoid collisions with the obstacle based on the trajectory predicted by the neural network ensemble. When OOD conditions are detected, we switch to a reachability-based controller to guarantee safety under the worst-case actions of the obstacle. We verify our method in extensive autonomous driving simulations in a pedestrian crossing scenario, showing that our OOD detector obtains the desired accuracy rate within a theoretically-predicted range. We also demonstrate the effectiveness of our method with real pedestrian data. We show improved safety and less conservatism in comparison with two state-of-the-art methods that also use conformal prediction, but without OOD adaptation.
Splat-MOVER: Multi-Stage, Open-Vocabulary Robotic Manipulation via Editable Gaussian Splatting
May 14, 2024



We present Splat-MOVER, a modular robotics stack for open-vocabulary robotic manipulation, which leverages the editability of Gaussian Splatting (GSplat) scene representations to enable multi-stage manipulation tasks. Splat-MOVER consists of: (i) ASK-Splat, a GSplat representation that distills latent codes for language semantics and grasp affordance into the 3D scene. ASK-Splat enables geometric, semantic, and affordance understanding of 3D scenes, which is critical for many robotics tasks; (ii) SEE-Splat, a real-time scene-editing module using 3D semantic masking and infilling to visualize the motions of objects that result from robot interactions in the real-world. SEE-Splat creates a "digital twin" of the evolving environment throughout the manipulation task; and (iii) Grasp-Splat, a grasp generation module that uses ASK-Splat and SEE-Splat to propose candidate grasps for open-world objects. ASK-Splat is trained in real-time from RGB images in a brief scanning phase prior to operation, while SEE-Splat and Grasp-Splat run in real-time during operation. We demonstrate the superior performance of Splat-MOVER in hardware experiments on a Kinova robot compared to two recent baselines in four single-stage, open-vocabulary manipulation tasks, as well as in four multi-stage manipulation tasks using the edited scene to reflect scene changes due to prior manipulation stages, which is not possible with the existing baselines. Code for this project and a link to the project page will be made available soon.