 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOut-of-Distribution Runtime Adaptation with Conformalized Neural Network Ensembles
Jun 04, 2024

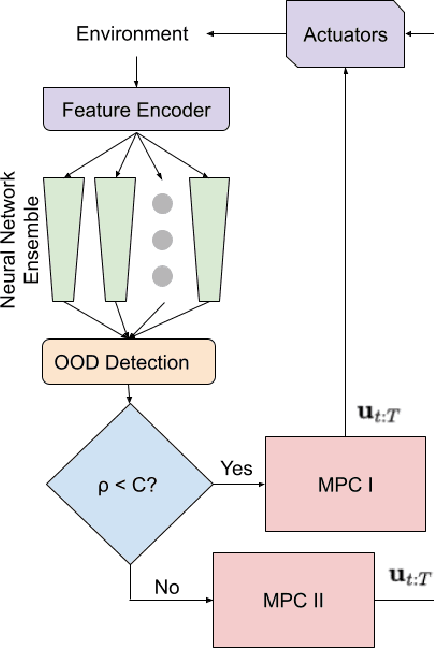

We present a method to integrate real-time out-of-distribution (OOD) detection for neural network trajectory predictors, and to adapt the control strategy of a robot (e.g., a self-driving car or drone) to preserve safety while operating in OOD regimes. Specifically, we use a neural network ensemble to predict the trajectory for a dynamic obstacle (such as a pedestrian), and use the maximum singular value of the empirical covariance among the ensemble as a signal for OOD detection. We calibrate this signal with a small fraction of held-out training data using the methodology of conformal prediction, to derive an OOD detector with probabilistic guarantees on the false-positive rate of the detector, given a user-specified confidence level. During in-distribution operation, we use an MPC controller to avoid collisions with the obstacle based on the trajectory predicted by the neural network ensemble. When OOD conditions are detected, we switch to a reachability-based controller to guarantee safety under the worst-case actions of the obstacle. We verify our method in extensive autonomous driving simulations in a pedestrian crossing scenario, showing that our OOD detector obtains the desired accuracy rate within a theoretically-predicted range. We also demonstrate the effectiveness of our method with real pedestrian data. We show improved safety and less conservatism in comparison with two state-of-the-art methods that also use conformal prediction, but without OOD adaptation.