 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVISTA: Open-Vocabulary, Task-Relevant Robot Exploration with Online Semantic Gaussian Splatting
Jul 01, 2025We present VISTA (Viewpoint-based Image selection with Semantic Task Awareness), an active exploration method for robots to plan informative trajectories that improve 3D map quality in areas most relevant for task completion. Given an open-vocabulary search instruction (e.g., "find a person"), VISTA enables a robot to explore its environment to search for the object of interest, while simultaneously building a real-time semantic 3D Gaussian Splatting reconstruction of the scene. The robot navigates its environment by planning receding-horizon trajectories that prioritize semantic similarity to the query and exploration of unseen regions of the environment. To evaluate trajectories, VISTA introduces a novel, efficient viewpoint-semantic coverage metric that quantifies both the geometric view diversity and task relevance in the 3D scene. On static datasets, our coverage metric outperforms state-of-the-art baselines, FisherRF and Bayes' Rays, in computation speed and reconstruction quality. In quadrotor hardware experiments, VISTA achieves 6x higher success rates in challenging maps, compared to baseline methods, while matching baseline performance in less challenging maps. Lastly, we show that VISTA is platform-agnostic by deploying it on a quadrotor drone and a Spot quadruped robot. Open-source code will be released upon acceptance of the paper.
SOUS VIDE: Cooking Visual Drone Navigation Policies in a Gaussian Splatting Vacuum
Dec 20, 2024



We propose a new simulator, training approach, and policy architecture, collectively called SOUS VIDE, for end-to-end visual drone navigation. Our trained policies exhibit zero-shot sim-to-real transfer with robust real-world performance using only on-board perception and computation. Our simulator, called FiGS, couples a computationally simple drone dynamics model with a high visual fidelity Gaussian Splatting scene reconstruction. FiGS can quickly simulate drone flights producing photorealistic images at up to 130 fps. We use FiGS to collect 100k-300k observation-action pairs from an expert MPC with privileged state and dynamics information, randomized over dynamics parameters and spatial disturbances. We then distill this expert MPC into an end-to-end visuomotor policy with a lightweight neural architecture, called SV-Net. SV-Net processes color image, optical flow and IMU data streams into low-level body rate and thrust commands at 20Hz onboard a drone. Crucially, SV-Net includes a Rapid Motor Adaptation (RMA) module that adapts at runtime to variations in drone dynamics. In a campaign of 105 hardware experiments, we show SOUS VIDE policies to be robust to 30% mass variations, 40 m/s wind gusts, 60% changes in ambient brightness, shifting or removing objects from the scene, and people moving aggressively through the drone's visual field. Code, data, and experiment videos can be found on our project page: https://stanfordmsl.github.io/SousVide/.
NerfBridge: Bringing Real-time, Online Neural Radiance Field Training to Robotics
May 16, 2023This work was presented at the IEEE International Conference on Robotics and Automation 2023 Workshop on Unconventional Spatial Representations. Neural radiance fields (NeRFs) are a class of implicit scene representations that model 3D environments from color images. NeRFs are expressive, and can model the complex and multi-scale geometry of real world environments, which potentially makes them a powerful tool for robotics applications. Modern NeRF training libraries can generate a photo-realistic NeRF from a static data set in just a few seconds, but are designed for offline use and require a slow pose optimization pre-computation step. In this work we propose NerfBridge, an open-source bridge between the Robot Operating System (ROS) and the popular Nerfstudio library for real-time, online training of NeRFs from a stream of images. NerfBridge enables rapid development of research on applications of NeRFs in robotics by providing an extensible interface to the efficient training pipelines and model libraries provided by Nerfstudio. As an example use case we outline a hardware setup that can be used NerfBridge to train a NeRF from images captured by a camera mounted to a quadrotor in both indoor and outdoor environments. For accompanying video https://youtu.be/EH0SLn-RcDg and code https://github.com/javieryu/nerf_bridge.
AirSim Drone Racing Lab
Mar 12, 2020
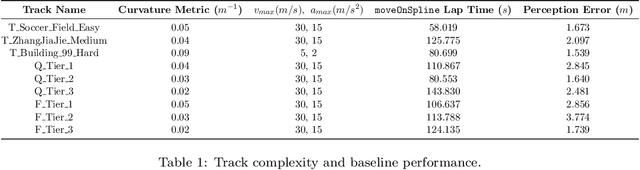

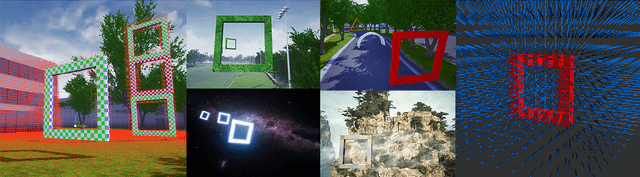
Autonomous drone racing is a challenging research problem at the intersection of computer vision, planning, state estimation, and control. We introduce AirSim Drone Racing Lab, a simulation framework for enabling fast prototyping of algorithms for autonomy and enabling machine learning research in this domain, with the goal of reducing the time, money, and risks associated with field robotics. Our framework enables generation of racing tracks in multiple photo-realistic environments, orchestration of drone races, comes with a suite of gate assets, allows for multiple sensor modalities (monocular, depth, neuromorphic events, optical flow), different camera models, and benchmarking of planning, control, computer vision, and learning-based algorithms. We used our framework to host a simulation based drone racing competition at NeurIPS 2019. The competition binaries are available at our github repository.