 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGASP: Gaussian Avatars with Synthetic Priors
Dec 10, 2024



Gaussian Splatting has changed the game for real-time photo-realistic rendering. One of the most popular applications of Gaussian Splatting is to create animatable avatars, known as Gaussian Avatars. Recent works have pushed the boundaries of quality and rendering efficiency but suffer from two main limitations. Either they require expensive multi-camera rigs to produce avatars with free-view rendering, or they can be trained with a single camera but only rendered at high quality from this fixed viewpoint. An ideal model would be trained using a short monocular video or image from available hardware, such as a webcam, and rendered from any view. To this end, we propose GASP: Gaussian Avatars with Synthetic Priors. To overcome the limitations of existing datasets, we exploit the pixel-perfect nature of synthetic data to train a Gaussian Avatar prior. By fitting this prior model to a single photo or video and fine-tuning it, we get a high-quality Gaussian Avatar, which supports 360$^\circ$ rendering. Our prior is only required for fitting, not inference, enabling real-time application. Through our method, we obtain high-quality, animatable Avatars from limited data which can be animated and rendered at 70fps on commercial hardware. See our project page (https://microsoft.github.io/GASP/) for results.
CausalCity: Complex Simulations with Agency for Causal Discovery and Reasoning
Jun 25, 2021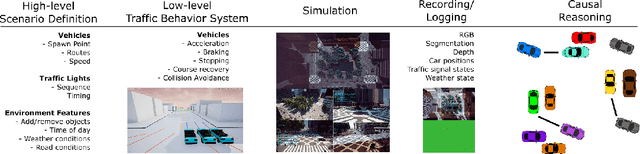
The ability to perform causal and counterfactual reasoning are central properties of human intelligence. Decision-making systems that can perform these types of reasoning have the potential to be more generalizable and interpretable. Simulations have helped advance the state-of-the-art in this domain, by providing the ability to systematically vary parameters (e.g., confounders) and generate examples of the outcomes in the case of counterfactual scenarios. However, simulating complex temporal causal events in multi-agent scenarios, such as those that exist in driving and vehicle navigation, is challenging. To help address this, we present a high-fidelity simulation environment that is designed for developing algorithms for causal discovery and counterfactual reasoning in the safety-critical context. A core component of our work is to introduce \textit{agency}, such that it is simple to define and create complex scenarios using high-level definitions. The vehicles then operate with agency to complete these objectives, meaning low-level behaviors need only be controlled if necessary. We perform experiments with three state-of-the-art methods to create baselines and highlight the affordances of this environment. Finally, we highlight challenges and opportunities for future work.
AirSim Drone Racing Lab
Mar 12, 2020
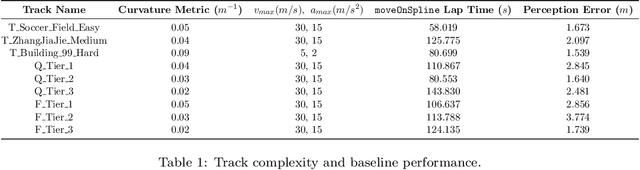

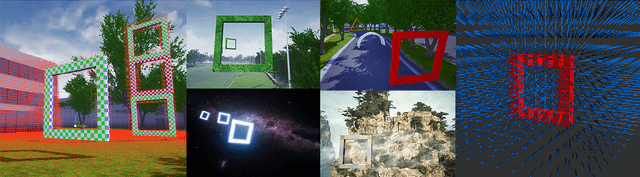
Autonomous drone racing is a challenging research problem at the intersection of computer vision, planning, state estimation, and control. We introduce AirSim Drone Racing Lab, a simulation framework for enabling fast prototyping of algorithms for autonomy and enabling machine learning research in this domain, with the goal of reducing the time, money, and risks associated with field robotics. Our framework enables generation of racing tracks in multiple photo-realistic environments, orchestration of drone races, comes with a suite of gate assets, allows for multiple sensor modalities (monocular, depth, neuromorphic events, optical flow), different camera models, and benchmarking of planning, control, computer vision, and learning-based algorithms. We used our framework to host a simulation based drone racing competition at NeurIPS 2019. The competition binaries are available at our github repository.