 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCausalCity: Complex Simulations with Agency for Causal Discovery and Reasoning
Paper and Code
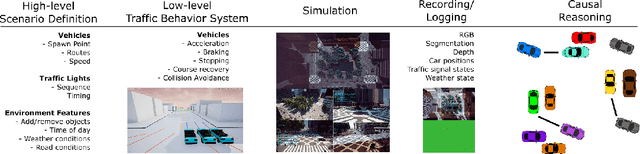
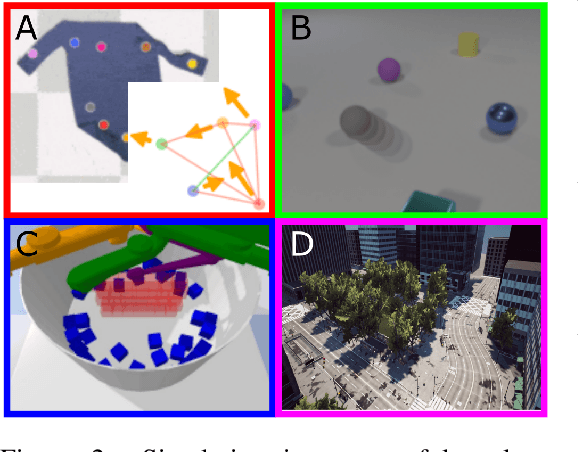
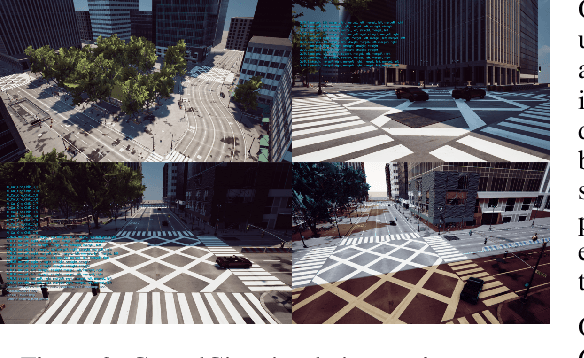
The ability to perform causal and counterfactual reasoning are central properties of human intelligence. Decision-making systems that can perform these types of reasoning have the potential to be more generalizable and interpretable. Simulations have helped advance the state-of-the-art in this domain, by providing the ability to systematically vary parameters (e.g., confounders) and generate examples of the outcomes in the case of counterfactual scenarios. However, simulating complex temporal causal events in multi-agent scenarios, such as those that exist in driving and vehicle navigation, is challenging. To help address this, we present a high-fidelity simulation environment that is designed for developing algorithms for causal discovery and counterfactual reasoning in the safety-critical context. A core component of our work is to introduce \textit{agency}, such that it is simple to define and create complex scenarios using high-level definitions. The vehicles then operate with agency to complete these objectives, meaning low-level behaviors need only be controlled if necessary. We perform experiments with three state-of-the-art methods to create baselines and highlight the affordances of this environment. Finally, we highlight challenges and opportunities for future work.