 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoinFT: A Coin-Sized, Capacitive 6-Axis Force Torque Sensor for Robotic Applications
Mar 25, 2025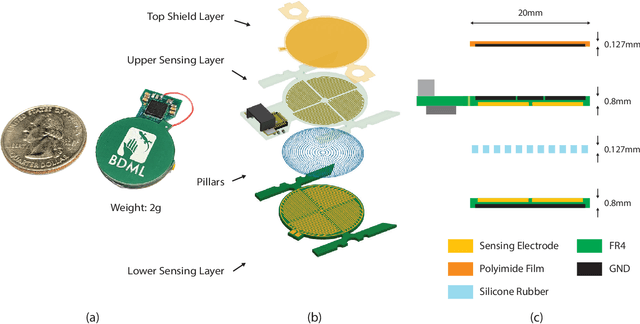
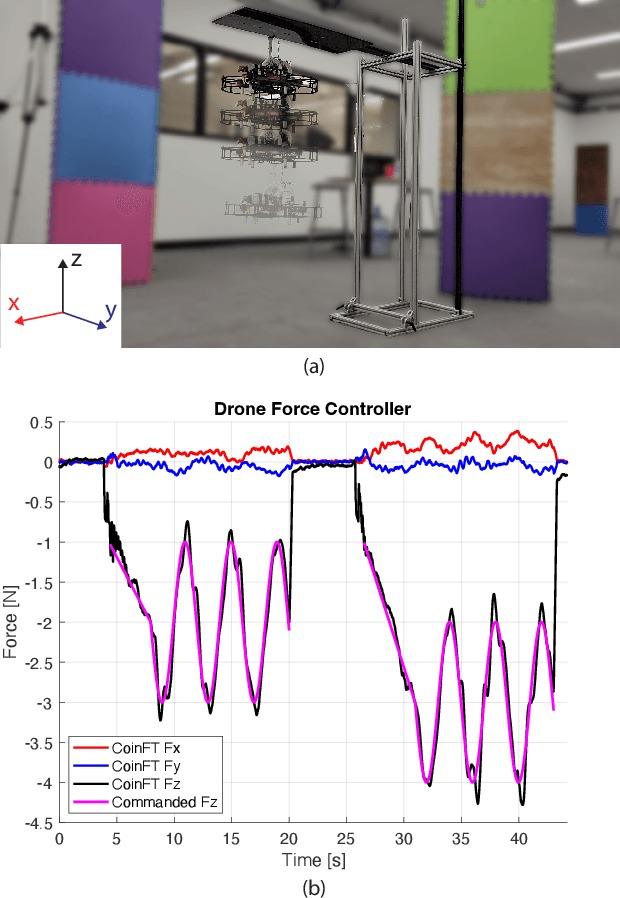
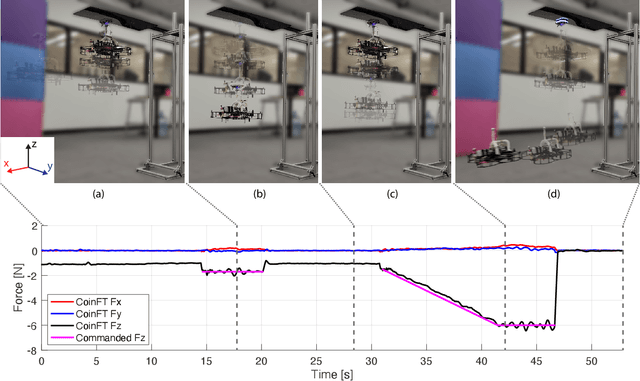
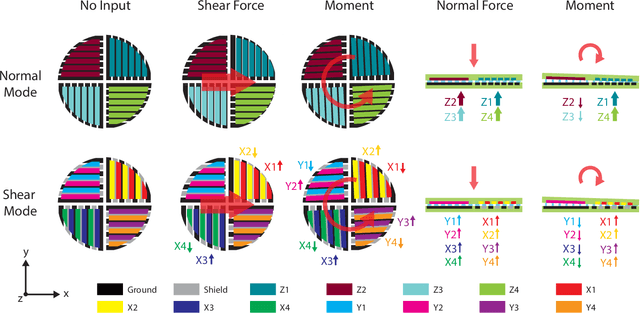
We introduce CoinFT, a capacitive 6-axis force/torque (F/T) sensor that is compact, light, low-cost, and robust with an average mean-squared error of 0.11N for force and 0.84mNm for moment when the input ranges from 0~10N and 0~4N in normal and shear directions, respectively. CoinFT is a stack of two rigid PCBs with comb-shaped electrodes connected by an array of silicone rubber pillars. The microcontroller interrogates the electrodes in different subsets in order to enhance sensitivity for measuring 6-axis F/T. The combination of desirable features of CoinFT enables various contact-rich robot interactions at a scale, across different embodiment domains including drones, robot end-effectors, and wearable haptic devices. We demonstrate the utility of CoinFT on drones by performing an attitude-based force control to perform tasks that require careful contact force modulation. The design, fabrication, and firmware of CoinFT are open-sourced at https://hojung-choi.github.io/coinft.github.io/.
Learning Robot Safety from Sparse Human Feedback using Conformal Prediction
Jan 08, 2025



Ensuring robot safety can be challenging; user-defined constraints can miss edge cases, policies can become unsafe even when trained from safe data, and safety can be subjective. Thus, we learn about robot safety by showing policy trajectories to a human who flags unsafe behavior. From this binary feedback, we use the statistical method of conformal prediction to identify a region of states, potentially in learned latent space, guaranteed to contain a user-specified fraction of future policy errors. Our method is sample-efficient, as it builds on nearest neighbor classification and avoids withholding data as is common with conformal prediction. By alerting if the robot reaches the suspected unsafe region, we obtain a warning system that mimics the human's safety preferences with guaranteed miss rate. From video labeling, our system can detect when a quadcopter visuomotor policy will fail to steer through a designated gate. We present an approach for policy improvement by avoiding the suspected unsafe region. With it we improve a model predictive controller's safety, as shown in experimental testing with 30 quadcopter flights across 6 navigation tasks. Code and videos are provided.
NerfBridge: Bringing Real-time, Online Neural Radiance Field Training to Robotics
May 16, 2023


This work was presented at the IEEE International Conference on Robotics and Automation 2023 Workshop on Unconventional Spatial Representations. Neural radiance fields (NeRFs) are a class of implicit scene representations that model 3D environments from color images. NeRFs are expressive, and can model the complex and multi-scale geometry of real world environments, which potentially makes them a powerful tool for robotics applications. Modern NeRF training libraries can generate a photo-realistic NeRF from a static data set in just a few seconds, but are designed for offline use and require a slow pose optimization pre-computation step. In this work we propose NerfBridge, an open-source bridge between the Robot Operating System (ROS) and the popular Nerfstudio library for real-time, online training of NeRFs from a stream of images. NerfBridge enables rapid development of research on applications of NeRFs in robotics by providing an extensible interface to the efficient training pipelines and model libraries provided by Nerfstudio. As an example use case we outline a hardware setup that can be used NerfBridge to train a NeRF from images captured by a camera mounted to a quadrotor in both indoor and outdoor environments. For accompanying video https://youtu.be/EH0SLn-RcDg and code https://github.com/javieryu/nerf_bridge.