 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIn-the-Wild Compliant Manipulation with UMI-FT
Jan 15, 2026Many manipulation tasks require careful force modulation. With insufficient force the task may fail, while excessive force could cause damage. The high cost, bulky size and fragility of commercial force/torque (F/T) sensors have limited large-scale, force-aware policy learning. We introduce UMI-FT, a handheld data-collection platform that mounts compact, six-axis force/torque sensors on each finger, enabling finger-level wrench measurements alongside RGB, depth, and pose. Using the multimodal data collected from this device, we train an adaptive compliance policy that predicts position targets, grasp force, and stiffness for execution on standard compliance controllers. In evaluations on three contact-rich, force-sensitive tasks (whiteboard wiping, skewering zucchini, and lightbulb insertion), UMI-FT enables policies that reliably regulate external contact forces and internal grasp forces, outperforming baselines that lack compliance or force sensing. UMI-FT offers a scalable path to learning compliant manipulation from in-the-wild demonstrations. We open-source the hardware and software to facilitate broader adoption at:https://umi-ft.github.io/.
Multimodal Sensing for Robot-Assisted Sub-Tissue Feature Detection in Physiotherapy Palpation
Dec 24, 2025Robotic palpation relies on force sensing, but force signals in soft-tissue environments are variable and cannot reliably reveal subtle subsurface features. We present a compact multimodal sensor that integrates high-resolution vision-based tactile imaging with a 6-axis force-torque sensor. In experiments on silicone phantoms with diverse subsurface tendon geometries, force signals alone frequently produce ambiguous responses, while tactile images reveal clear structural differences in presence, diameter, depth, crossings, and multiplicity. Yet accurate force tracking remains essential for maintaining safe, consistent contact during physiotherapeutic interaction. Preliminary results show that combining tactile and force modalities enables robust subsurface feature detection and controlled robotic palpation.
CoinFT: A Coin-Sized, Capacitive 6-Axis Force Torque Sensor for Robotic Applications
Mar 25, 2025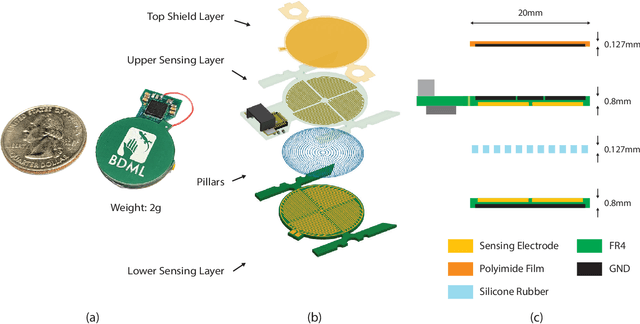
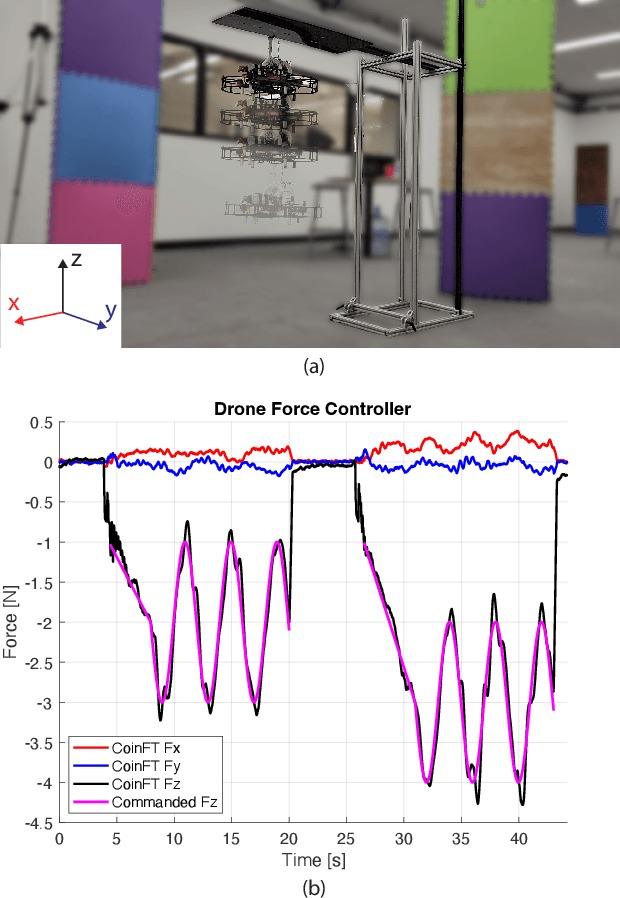
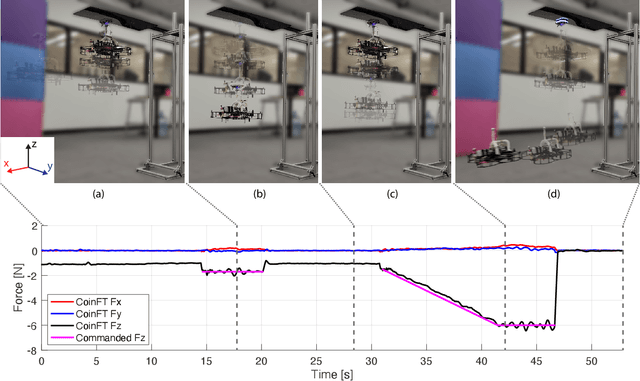
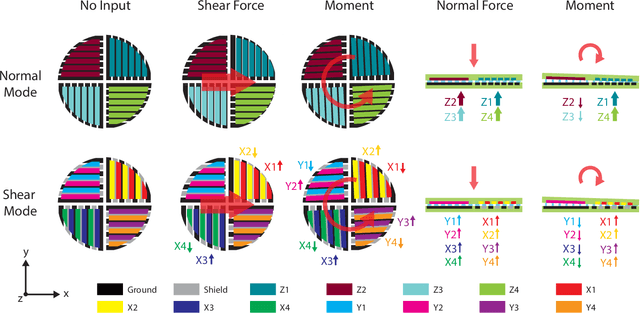
We introduce CoinFT, a capacitive 6-axis force/torque (F/T) sensor that is compact, light, low-cost, and robust with an average mean-squared error of 0.11N for force and 0.84mNm for moment when the input ranges from 0~10N and 0~4N in normal and shear directions, respectively. CoinFT is a stack of two rigid PCBs with comb-shaped electrodes connected by an array of silicone rubber pillars. The microcontroller interrogates the electrodes in different subsets in order to enhance sensitivity for measuring 6-axis F/T. The combination of desirable features of CoinFT enables various contact-rich robot interactions at a scale, across different embodiment domains including drones, robot end-effectors, and wearable haptic devices. We demonstrate the utility of CoinFT on drones by performing an attitude-based force control to perform tasks that require careful contact force modulation. The design, fabrication, and firmware of CoinFT are open-sourced at https://hojung-choi.github.io/coinft.github.io/.