 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIn-the-Wild Compliant Manipulation with UMI-FT
Jan 15, 2026Many manipulation tasks require careful force modulation. With insufficient force the task may fail, while excessive force could cause damage. The high cost, bulky size and fragility of commercial force/torque (F/T) sensors have limited large-scale, force-aware policy learning. We introduce UMI-FT, a handheld data-collection platform that mounts compact, six-axis force/torque sensors on each finger, enabling finger-level wrench measurements alongside RGB, depth, and pose. Using the multimodal data collected from this device, we train an adaptive compliance policy that predicts position targets, grasp force, and stiffness for execution on standard compliance controllers. In evaluations on three contact-rich, force-sensitive tasks (whiteboard wiping, skewering zucchini, and lightbulb insertion), UMI-FT enables policies that reliably regulate external contact forces and internal grasp forces, outperforming baselines that lack compliance or force sensing. UMI-FT offers a scalable path to learning compliant manipulation from in-the-wild demonstrations. We open-source the hardware and software to facilitate broader adoption at:https://umi-ft.github.io/.
Multimodal Sensing for Robot-Assisted Sub-Tissue Feature Detection in Physiotherapy Palpation
Dec 24, 2025Robotic palpation relies on force sensing, but force signals in soft-tissue environments are variable and cannot reliably reveal subtle subsurface features. We present a compact multimodal sensor that integrates high-resolution vision-based tactile imaging with a 6-axis force-torque sensor. In experiments on silicone phantoms with diverse subsurface tendon geometries, force signals alone frequently produce ambiguous responses, while tactile images reveal clear structural differences in presence, diameter, depth, crossings, and multiplicity. Yet accurate force tracking remains essential for maintaining safe, consistent contact during physiotherapeutic interaction. Preliminary results show that combining tactile and force modalities enables robust subsurface feature detection and controlled robotic palpation.
CoinFT: A Coin-Sized, Capacitive 6-Axis Force Torque Sensor for Robotic Applications
Mar 25, 2025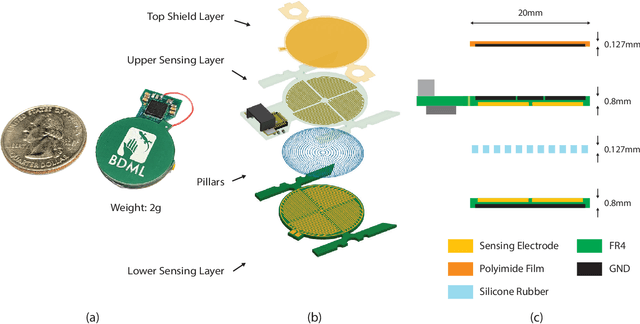
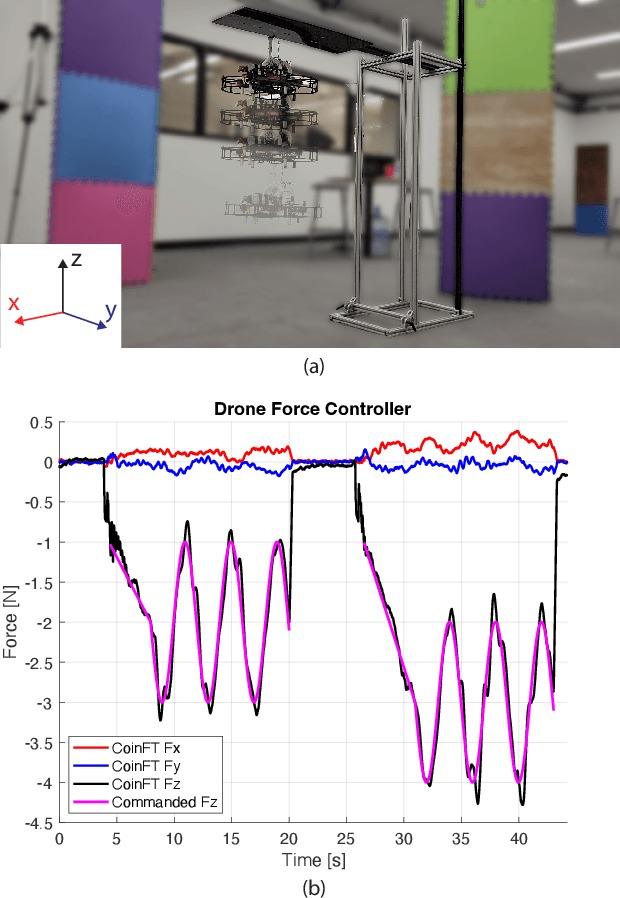
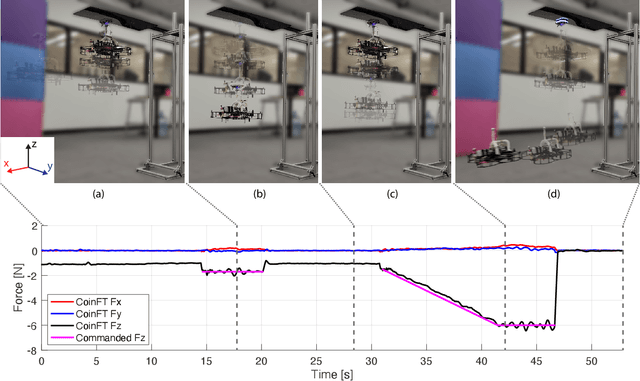
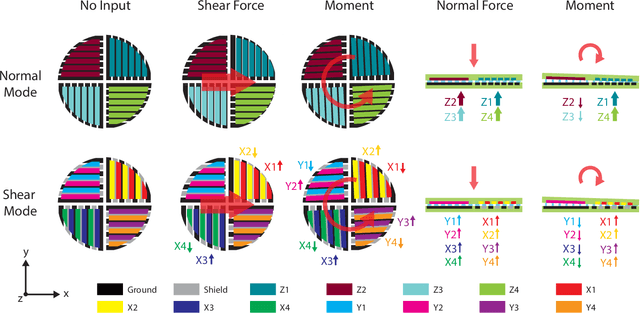
We introduce CoinFT, a capacitive 6-axis force/torque (F/T) sensor that is compact, light, low-cost, and robust with an average mean-squared error of 0.11N for force and 0.84mNm for moment when the input ranges from 0~10N and 0~4N in normal and shear directions, respectively. CoinFT is a stack of two rigid PCBs with comb-shaped electrodes connected by an array of silicone rubber pillars. The microcontroller interrogates the electrodes in different subsets in order to enhance sensitivity for measuring 6-axis F/T. The combination of desirable features of CoinFT enables various contact-rich robot interactions at a scale, across different embodiment domains including drones, robot end-effectors, and wearable haptic devices. We demonstrate the utility of CoinFT on drones by performing an attitude-based force control to perform tasks that require careful contact force modulation. The design, fabrication, and firmware of CoinFT are open-sourced at https://hojung-choi.github.io/coinft.github.io/.
DexForce: Extracting Force-informed Actions from Kinesthetic Demonstrations for Dexterous Manipulation
Jan 17, 2025



Imitation learning requires high-quality demonstrations consisting of sequences of state-action pairs. For contact-rich dexterous manipulation tasks that require fine-grained dexterity, the actions in these state-action pairs must produce the right forces. Current widely-used methods for collecting dexterous manipulation demonstrations are difficult to use for demonstrating contact-rich tasks due to unintuitive human-to-robot motion retargeting and the lack of direct haptic feedback. Motivated by this, we propose DexForce, a method for collecting demonstrations of contact-rich dexterous manipulation. DexForce leverages contact forces, measured during kinesthetic demonstrations, to compute force-informed actions for policy learning. We use DexForce to collect demonstrations for six tasks and show that policies trained on our force-informed actions achieve an average success rate of 76% across all tasks. In contrast, policies trained directly on actions that do not account for contact forces have near-zero success rates. We also conduct a study ablating the inclusion of force data in policy observations. We find that while using force data never hurts policy performance, it helps the most for tasks that require an advanced level of precision and coordination, like opening an AirPods case and unscrewing a nut.
Tactile-Informed Action Primitives Mitigate Jamming in Dense Clutter
Feb 14, 2024



It is difficult for robots to retrieve objects in densely cluttered lateral access scenes with movable objects as jamming against adjacent objects and walls can inhibit progress. We propose the use of two action primitives -- burrowing and excavating -- that can fluidize the scene to un-jam obstacles and enable continued progress. Even when these primitives are implemented in an open loop manner at clock-driven intervals, we observe a decrease in the final distance to the target location. Furthermore, we combine the primitives into a closed loop hybrid control strategy using tactile and proprioceptive information to leverage the advantages of both primitives without being overly disruptive. In doing so, we achieve a 10-fold increase in success rate above the baseline control strategy and significantly improve completion times as compared to the primitives alone or a naive combination of them.
Deep Learning Classification of Touch Gestures Using Distributed Normal and Shear Force
Sep 30, 2022



When humans socially interact with another agent (e.g., human, pet, or robot) through touch, they do so by applying varying amounts of force with different directions, locations, contact areas, and durations. While previous work on touch gesture recognition has focused on the spatio-temporal distribution of normal forces, we hypothesize that the addition of shear forces will permit more reliable classification. We present a soft, flexible skin with an array of tri-axial tactile sensors for the arm of a person or robot. We use it to collect data on 13 touch gesture classes through user studies and train a Convolutional Neural Network (CNN) to learn spatio-temporal features from the recorded data. The network achieved a recognition accuracy of 74% with normal and shear data, compared to 66% using only normal force data. Adding distributed shear data improved classification accuracy for 11 out of 13 touch gesture classes.