 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning Classification of Touch Gestures Using Distributed Normal and Shear Force
Sep 30, 2022



When humans socially interact with another agent (e.g., human, pet, or robot) through touch, they do so by applying varying amounts of force with different directions, locations, contact areas, and durations. While previous work on touch gesture recognition has focused on the spatio-temporal distribution of normal forces, we hypothesize that the addition of shear forces will permit more reliable classification. We present a soft, flexible skin with an array of tri-axial tactile sensors for the arm of a person or robot. We use it to collect data on 13 touch gesture classes through user studies and train a Convolutional Neural Network (CNN) to learn spatio-temporal features from the recorded data. The network achieved a recognition accuracy of 74% with normal and shear data, compared to 66% using only normal force data. Adding distributed shear data improved classification accuracy for 11 out of 13 touch gesture classes.
A Portable and Passive Gravity Compensation Arm Support for Drone Teleoperation
Nov 10, 2021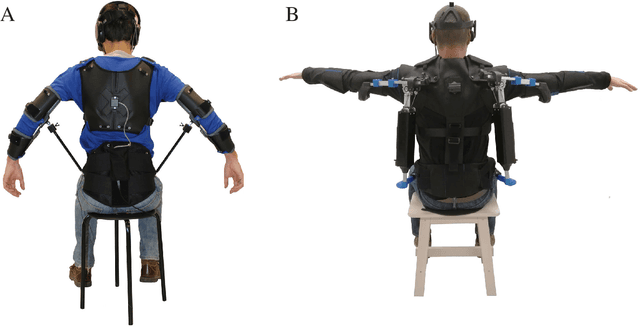
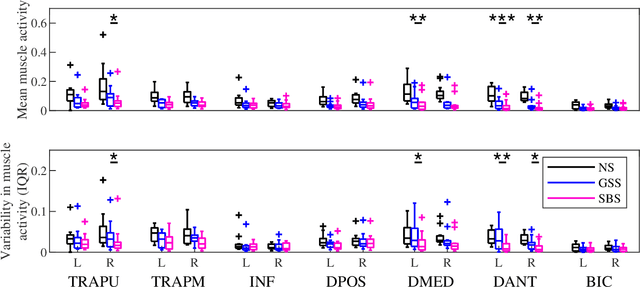

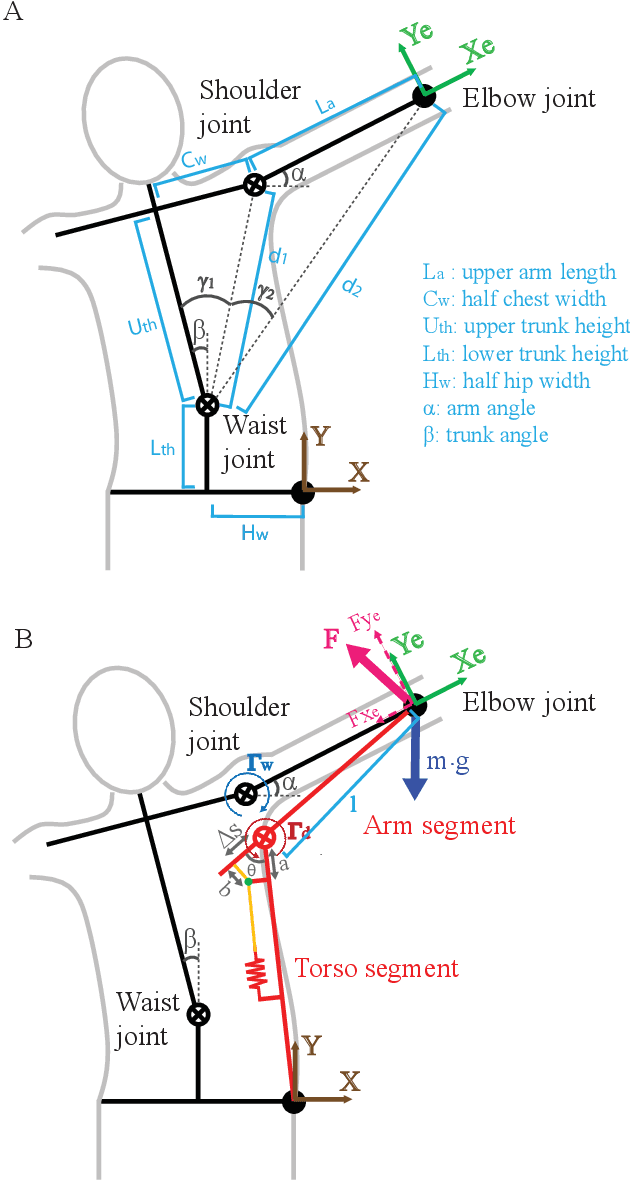
Gesture-based interfaces are often used to achieve a more natural and intuitive teleoperation of robots. Yet, sometimes, gesture control requires postures or movements that cause significant fatigue to the user. In a previous user study, we demonstrated that na\"ive users can control a fixed-wing drone with torso movements while their arms are spread out. However, this posture induced significant arm fatigue. In this work, we present a passive arm support that compensates the arm weight with a mean torque error smaller than 0.005 N/kg for more than 97% of the range of motion used by subjects to fly, therefore reducing muscular fatigue in the shoulder of on average 58%. In addition, this arm support is designed to fit users from the body dimension of the 1st percentile female to the 99th percentile male. The performance analysis of the arm support is described with a mechanical model and its implementation is validated with both a mechanical characterization and a user study, which measures the flight performance, the shoulder muscle activity and the user acceptance.