 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlying Together: Human-Guided Immersive Shared Control for Aerial Robot Teams in Unknown Environments
May 20, 2026While autonomous multi-robots can achieve safe and coordinated navigation, they often struggle to adapt to unforeseen conditions and to capture operator-driven objectives in unstructured environments. We present a Virtual Reality (VR)-based shared control framework for teams of drones operating in constrained and unknown environments, enabling real-time, user-guided exploration. At the core of our approach is a novel, user-guided motion-primitive-based planner that computes continuous, collision-free trajectories while continuously integrating operator input. This planner is coupled with an admittance controller, allowing the operator to flexibly influence team behavior and guide drones toward regions of interest that autonomous planners may overlook. The system supports mixed-reality operations with both physical and simulated drones, and implements a bilateral VR-based interface, allowing the operator to guide the robot team via migration points while receiving immediate visual feedback of the team state. Experimental results show that shared control improves obstacle avoidance, maintains inter-agent spacing, and reduces operator effort, demonstrating the feasibility and advantages of immersive, human-in-the-loop multi-robot navigation.
Accurate Trajectory Tracking with MPCC for Flapping-Wing MAVs
May 07, 2026Flapping-wing micro aerial vehicles offer quieter and safer operation than rotary-wing drones, yet achieving precise autonomous control of bird-scale ornithopters remains challenging: lift, airspeed, and turning authority are tightly coupled and governed by only a few control inputs. Conventional cascaded controllers treat altitude, speed, and heading independently, producing persistent tracking errors during complex maneuvers, while time-parameterized trajectory tracking requires predefined speed profiles that existing methods cannot robustly produce for these coupled dynamics. We address both limitations simultaneously with a Model Predictive Contouring Control (MPCC) approach that tracks arc-length-parameterized trajectories while optimizing progress online, eliminating the need for predefined timing. However, MPCC requires a dynamical model that captures the coupled aerodynamics without exceeding the computational budget of real-time nonlinear optimization. Here, we propose a compact, continuously differentiable model that captures the dominant couplings of bird-scale ornithopters, enabling real-time predictive control. We validated the method with the XFly ornithopter flying along circular and three-dimensional racing trajectories and achieved a mean deviation from the reference trajectory between 6.5 and 9 cm at speeds up to 3 m/s, which represents an almost 10-fold improvement over prior ornithopter control methods.
Hebbian Attractor Networks for Robot Locomotion
Mar 23, 2026Biological neural networks continuously adapt and modify themselves in response to experiences throughout their lifetime - a capability largely absent in artificial neural networks. Hebbian plasticity offers a promising path toward rapid adaptation in changing environments. Here, we introduce Hebbian Attractor Networks (HAN), a class of plastic neural networks in which local weight update normalization induces emergent attractor dynamics. Unlike prior approaches, HANs employ dual-timescale plasticity and temporal averaging of pre- and postsynaptic activations to induce either co-dynamic limit cycles or fixed-point weight attractors. Using simulated locomotion benchmarks, we gain insight into how Hebbian update frequency and activation averaging influence weight dynamics and control performance. Our results show that slower updates, combined with averaged pre- and postsynaptic activations, promote convergence to stable weight configurations, while faster updates yield oscillatory co-dynamic systems. We further demonstrate that these findings generalize to high-dimensional quadrupedal locomotion with a simulated Unitree Go1 robot. These results highlight how the timing of plasticity shapes neural dynamics in embodied systems, providing a principled characterization of the attractor regimes that emerge in self-modifying networks.
Flight through Narrow Gaps with Morphing-Wing Drones
Mar 12, 2026The size of a narrow gap traversable by a fixed-wing drone is limited by its wingspan. Inspired by birds, here, we enable the traversal of a gap of sub-wingspan width and height using a morphing-wing drone capable of temporarily sweeping in its wings mid-flight. This maneuver poses control challenges due to sudden lift loss during gap-passage at low flight speeds and the need for precisely timed wing-sweep actuation ahead of the gap. To address these challenges, we first develop an aerodynamic model for general wing-sweep morphing drone flight including low flight speeds and post-stall angles of attack. We integrate longitudinal drone dynamics into an optimal reference trajectory generation and Nonlinear Model Predictive Control framework with runtime adaptive costs and constraints. Validated on a 130 g wing-sweep-morphing drone, our method achieves an average altitude error of 5 cm during narrow-gap passage at forward speeds between 5 and 7 m/s, whilst enforcing fully swept wings near the gap across variable threshold distances. Trajectory analysis shows that the drone can compensate for lift loss during gap-passage by accelerating and pitching upwards ahead of the gap to an extent that differs between reference trajectory optimization objectives. We show that our strategy also allows for accurate gap passage on hardware whilst maintaining a constant forward flight speed reference and near-constant altitude.
Miniature multihole airflow sensor for lightweight aircraft over wide speed and angular range
May 06, 2025An aircraft's airspeed, angle of attack, and angle of side slip are crucial to its safety, especially when flying close to the stall regime. Various solutions exist, including pitot tubes, angular vanes, and multihole pressure probes. However, current sensors are either too heavy (>30 g) or require large airspeeds (>20 m/s), making them unsuitable for small uncrewed aerial vehicles. We propose a novel multihole pressure probe, integrating sensing electronics in a single-component structure, resulting in a mechanically robust and lightweight sensor (9 g), which we released to the public domain. Since there is no consensus on two critical design parameters, tip shape (conical vs spherical) and hole spacing (distance between holes), we provide a study on measurement accuracy and noise generation using wind tunnel experiments. The sensor is calibrated using a multivariate polynomial regression model over an airspeed range of 3-27 m/s and an angle of attack/sideslip range of +-35{\deg}, achieving a mean absolute error of 0.44 m/s and 0.16{\deg}. Finally, we validated the sensor in outdoor flights near the stall regime. Our probe enabled accurate estimations of airspeed, angle of attack and sideslip during different acrobatic manoeuvres. Due to its size and weight, this sensor will enable safe flight for lightweight, uncrewed aerial vehicles flying at low speeds close to the stall regime.
Tensegrity-based Robot Leg Design with Variable Stiffness
Apr 28, 2025
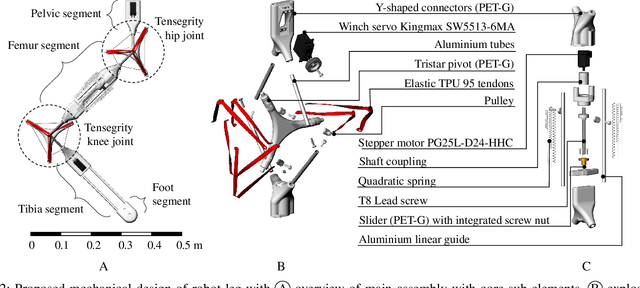


Animals can finely modulate their leg stiffness to interact with complex terrains and absorb sudden shocks. In feats like leaping and sprinting, animals demonstrate a sophisticated interplay of opposing muscle pairs that actively modulate joint stiffness, while tendons and ligaments act as biological springs storing and releasing energy. Although legged robots have achieved notable progress in robust locomotion, they still lack the refined adaptability inherent in animal motor control. Integrating mechanisms that allow active control of leg stiffness presents a pathway towards more resilient robotic systems. This paper proposes a novel mechanical design to integrate compliancy into robot legs based on tensegrity - a structural principle that combines flexible cables and rigid elements to balance tension and compression. Tensegrity structures naturally allow for passive compliance, making them well-suited for absorbing impacts and adapting to diverse terrains. Our design features a robot leg with tensegrity joints and a mechanism to control the joint's rotational stiffness by modulating the tension of the cable actuation system. We demonstrate that the robot leg can reduce the impact forces of sudden shocks by at least 34.7 % and achieve a similar leg flexion under a load difference of 10.26 N by adjusting its stiffness configuration. The results indicate that tensegrity-based leg designs harbors potential towards more resilient and adaptable legged robots.
Fast ground-to-air transition with avian-inspired multifunctional legs
Dec 03, 2024Most birds can navigate seamlessly between aerial and terrestrial environments. Whereas the forelimbs evolved into wings primarily for flight, the hindlimbs serve diverse functions such as walking, hopping, and leaping, and jumping take-off for transitions into flight. These capabilities have inspired engineers to aim for similar multi-modality in aerial robots, expanding their range of applications across diverse environments. However, challenges remain in reproducing multi-modal locomotion, across gaits with distinct kinematics and propulsive characteristics, such as walking and jumping, while preserving lightweight mass for flight. This tradeoff between mechanical complexity and versatility limits most existing aerial robots to only one additional locomotor mode. Here, we overcome the complexity-versatility tradeoff with RAVEN (Robotic Avian-inspired Vehicle for multiple ENvironments), which uses its bird-inspired multi-functional legs to jump rapidly into flight, walk on ground and hop over obstacles and gaps similar to the multi-modal locomotion of birds. We show that jumping for take-off contributes substantially to initial flight take-off speed and, remarkably, that it is more energy-efficient than solely propeller-based take-off. Our analysis suggests an important tradeoff in mass distribution between legs and body among birds adapted for different locomotor strategies, with greater investment in leg mass among terrestrial birds with multi-modal gait demands. Multi-functional robot legs expand opportunities to deploy traditional fixed-wing aircraft in complex terrains through autonomous take-offs and multi-modal gaits.
Passive wing deployment and retraction in beetles and flapping microrobots
Jul 25, 2024Birds, bats and many insects can tuck their wings against their bodies at rest and deploy them to power flight. Whereas birds and bats use well-developed pectoral and wing muscles and tendons, how insects control these movements remains unclear, as mechanisms of wing deployment and retraction vary among insect species. Beetles (Coleoptera) display one of the most complex wing mechanisms. For example, in rhinoceros beetles, the wing deployment initiates by fully opening the elytra and partially releasing the hindwings from the abdomen. Subsequently, the beetle starts flapping, elevates the hindwings at the bases, and unfolds the wingtips in an origami-like fashion. Whilst the origami-like fold have been extensively explored, limited attention has been given to the hindwing base deployment and retraction, which are believed to be driven by thoracic muscles. Using high-speed cameras and robotic flapping-wing models, here we demonstrate that rhinoceros beetles can effortlessly elevate the hindwings to flight position without the need for muscular activity. We show that opening the elytra triggers a spring-like partial release of the hindwings from the body, allowing the clearance needed for subsequent flapping motion that brings the hindwings into flight position. The results also show that after flight, beetles can leverage the elytra to push the hindwings back into the resting position, further strengthening the hypothesis of a passive deployment mechanism. Finally, we validate the hypothesis with a flapping microrobot that passively deploys its wings for stable controlled flight and retracts them neatly upon landing, which offers a simple yet effective approach to the design of insect-like flying micromachines.
Adaptive morphing of wing and tail for stable, resilient, and energy-efficient flight of avian-informed drones
Mar 13, 2024



Avian-informed drones feature morphing wing and tail surfaces, enhancing agility and adaptability in flight. Despite their large potential, realising their full capabilities remains challenging due to the lack of generalized control strategies accommodating their large degrees of freedom and cross-coupling effects between their control surfaces. Here we propose a new body-rate controller for avian-informed drones that uses all available actuators to control the motion of the drone. The method exhibits robustness against physical perturbations, turbulent airflow, and even loss of certain actuators mid-flight. Furthermore, wing and tail morphing is leveraged to enhance energy efficiency at 8m/s, 10m/s and 12m/s using in-flight Bayesian optimization. The resulting morphing configurations yield significant gains across all three speeds of up to 11.5% compared to non-morphing configurations and display a strong resemblance to avian flight at different speeds. This research lays the groundwork for the development of autonomous avian-informed drones that operate under diverse wind conditions, emphasizing the role of morphing in improving energy efficiency.
High-Speed Motion Planning for Aerial Swarms in Unknown and Cluttered Environments
Feb 29, 2024



Coordinated flight of multiple drones allows to achieve tasks faster such as search and rescue and infrastructure inspection. Thus, pushing the state-of-the-art of aerial swarms in navigation speed and robustness is of tremendous benefit. In particular, being able to account for unexplored/unknown environments when planning trajectories allows for safer flight. In this work, we propose the first high-speed, decentralized, and synchronous motion planning framework (HDSM) for an aerial swarm that explicitly takes into account the unknown/undiscovered parts of the environment. The proposed approach generates an optimized trajectory for each planning agent that avoids obstacles and other planning agents while moving and exploring the environment. The only global information that each agent has is the target location. The generated trajectory is high-speed, safe from unexplored spaces, and brings the agent closer to its goal. The proposed method outperforms four recent state-of-the-art methods in success rate (100% success in reaching the target location), flight speed (67% faster), and flight time (42% lower). Finally, the method is validated on a set of Crazyflie nano-drones as a proof of concept.