 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast ground-to-air transition with avian-inspired multifunctional legs
Dec 03, 2024Most birds can navigate seamlessly between aerial and terrestrial environments. Whereas the forelimbs evolved into wings primarily for flight, the hindlimbs serve diverse functions such as walking, hopping, and leaping, and jumping take-off for transitions into flight. These capabilities have inspired engineers to aim for similar multi-modality in aerial robots, expanding their range of applications across diverse environments. However, challenges remain in reproducing multi-modal locomotion, across gaits with distinct kinematics and propulsive characteristics, such as walking and jumping, while preserving lightweight mass for flight. This tradeoff between mechanical complexity and versatility limits most existing aerial robots to only one additional locomotor mode. Here, we overcome the complexity-versatility tradeoff with RAVEN (Robotic Avian-inspired Vehicle for multiple ENvironments), which uses its bird-inspired multi-functional legs to jump rapidly into flight, walk on ground and hop over obstacles and gaps similar to the multi-modal locomotion of birds. We show that jumping for take-off contributes substantially to initial flight take-off speed and, remarkably, that it is more energy-efficient than solely propeller-based take-off. Our analysis suggests an important tradeoff in mass distribution between legs and body among birds adapted for different locomotor strategies, with greater investment in leg mass among terrestrial birds with multi-modal gait demands. Multi-functional robot legs expand opportunities to deploy traditional fixed-wing aircraft in complex terrains through autonomous take-offs and multi-modal gaits.
Avian-Inspired Claws Enable Robot Perching and Walking
Mar 29, 2023
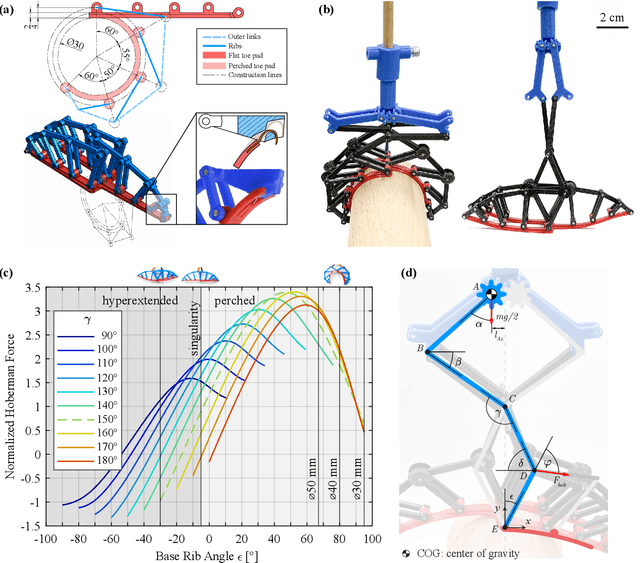
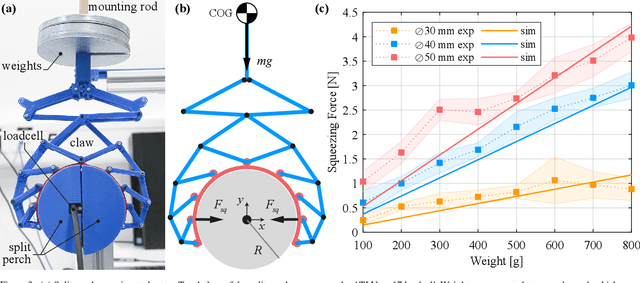
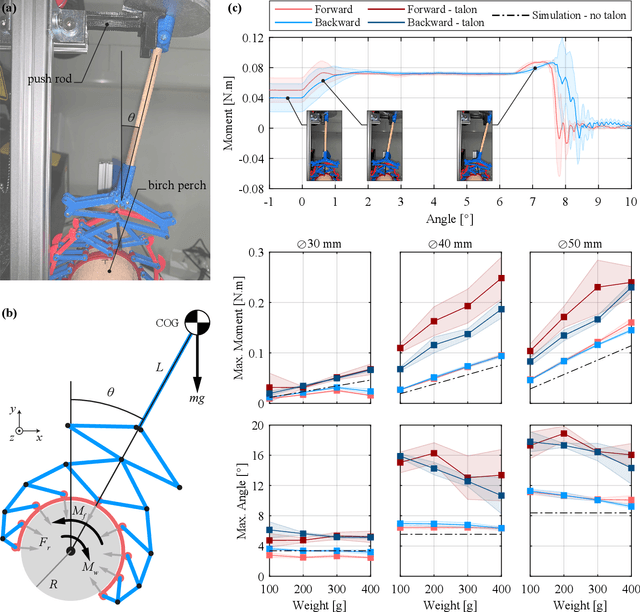
Multimodal UAVs (Unmanned Aerial Vehicles) are rarely capable of more than two modalities, i.e., flying and walking or flying and perching. However, being able to fly, perch, and walk could further improve their usefulness by expanding their operating envelope. For instance, an aerial robot could fly a long distance, perch in a high place to survey the surroundings, then walk to avoid obstacles that could potentially inhibit flight. Birds are capable of these three tasks, and so offer a practical example of how a robot might be developed to do the same. In this paper, we present a specialized avian-inspired claw design to enable UAVs to passively perch and walk. The key innovation is the combination of a Hoberman linkage leg with Fin Ray claw that uses the weight of the UAV to wrap the claw around a perch, or hyperextend it in the opposite direction to form a ball shape for stable terrestrial locomotion. Because the design uses the weight of the vehicle, the underactuated design is lightweight and low power. With the inclusion of talons, the 45g claws are capable of holding a 700g UAV to an almost 20-degree angle on a perch. In scenarios where cluttered environments impede flight and long mission times are required, such a combination of flying, perching, and walking is critical.