 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe human biological advantage over AI
Sep 04, 2025Recent advances in AI raise the possibility that AI systems will one day be able to do anything humans can do, only better. If artificial general intelligence (AGI) is achieved, AI systems may be able to understand, reason, problem solve, create, and evolve at a level and speed that humans will increasingly be unable to match, or even understand. These possibilities raise a natural question as to whether AI will eventually become superior to humans, a successor "digital species", with a rightful claim to assume leadership of the universe. However, a deeper consideration suggests the overlooked differentiator between human beings and AI is not the brain, but the central nervous system (CNS), providing us with an immersive integration with physical reality. It is our CNS that enables us to experience emotion including pain, joy, suffering, and love, and therefore to fully appreciate the consequences of our actions on the world around us. And that emotional understanding of the consequences of our actions is what is required to be able to develop sustainable ethical systems, and so be fully qualified to be the leaders of the universe. A CNS cannot be manufactured or simulated; it must be grown as a biological construct. And so, even the development of consciousness will not be sufficient to make AI systems superior to humans. AI systems may become more capable than humans on almost every measure and transform our society. However, the best foundation for leadership of our universe will always be DNA, not silicon.
* 12 pages
Crash-perching on vertical poles with a hugging-wing robot
Feb 03, 2024Perching with winged Unmanned Aerial Vehicles has often been solved by means of complex control or intricate appendages. Here, we present a simple yet novel method that relies on passive wing morphing for crash-landing on trees and other types of vertical poles. Inspired by the adaptability of animals' and bats' limbs in gripping and holding onto trees, we design dual-purpose wings that enable both aerial gliding and perching on poles. With an upturned nose design, the robot can passively reorient from horizontal flight to vertical upon a head-on crash with a pole, followed by hugging with its wings to perch. We characterize the performance of reorientation and perching in terms of impact speed and angle, pole material, and size. The robot robustly reorients at impact angles above 15{\deg} and speeds of 3 m/s to 9 m/s, and can hold onto various pole types larger than 28% of its wingspan in diameter. We demonstrate crash-perching on tree trunks with an overall success rate of 71%. The method opens up new possibilities for the use of aerial robots in applications such as inspection, maintenance, and biodiversity conservation.
Perching by hugging: an initial feasibility study
Jun 08, 2023



Current UAVs capable of perching require added structure and mechanisms to accomplish this. These take the form of hooks, claws, needles, etc which add weight and usually drag. We propose in this paper the dual use of structures already on the vehicle to enable perching, thus reducing the weight and drag cost associated with perching UAVs. We propose a wing design capable of passively wrapping around a vertical pole to perch. We experimentally investigate the feasibility of the design, presenting results on minimum required perching speeds as well as the effect of weight distribution on the success rate of the wing wrapping. Finally, we comment on design requirements for holding onto the pole based on our findings.
Avian-Inspired Claws Enable Robot Perching and Walking
Mar 29, 2023
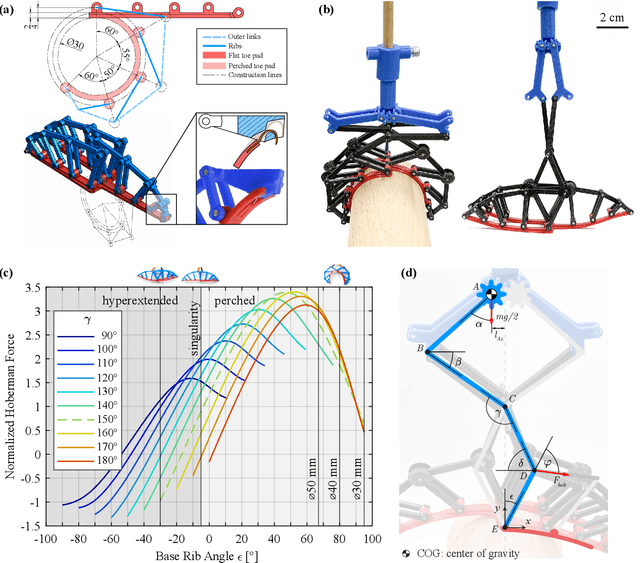
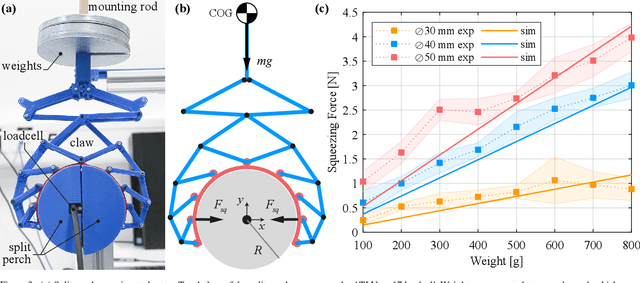
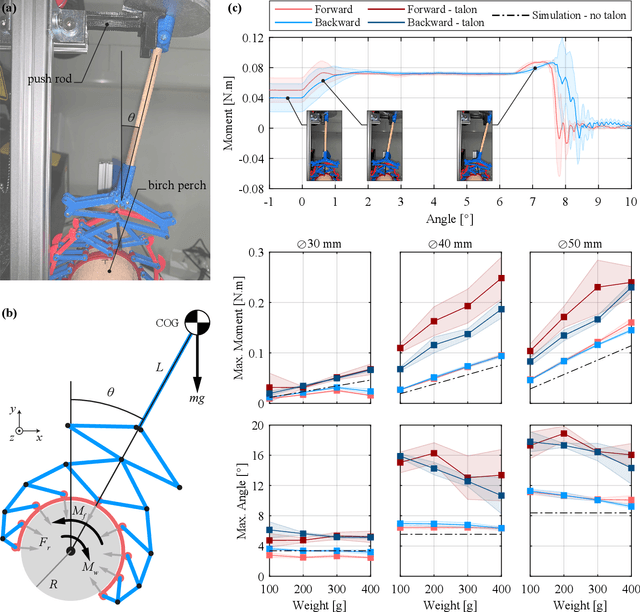
Multimodal UAVs (Unmanned Aerial Vehicles) are rarely capable of more than two modalities, i.e., flying and walking or flying and perching. However, being able to fly, perch, and walk could further improve their usefulness by expanding their operating envelope. For instance, an aerial robot could fly a long distance, perch in a high place to survey the surroundings, then walk to avoid obstacles that could potentially inhibit flight. Birds are capable of these three tasks, and so offer a practical example of how a robot might be developed to do the same. In this paper, we present a specialized avian-inspired claw design to enable UAVs to passively perch and walk. The key innovation is the combination of a Hoberman linkage leg with Fin Ray claw that uses the weight of the UAV to wrap the claw around a perch, or hyperextend it in the opposite direction to form a ball shape for stable terrestrial locomotion. Because the design uses the weight of the vehicle, the underactuated design is lightweight and low power. With the inclusion of talons, the 45g claws are capable of holding a 700g UAV to an almost 20-degree angle on a perch. In scenarios where cluttered environments impede flight and long mission times are required, such a combination of flying, perching, and walking is critical.
Connecting the dots across time: Reconstruction of single cell signaling trajectories using time-stamped data
Jul 20, 2017Single cell responses are shaped by the geometry of signaling kinetic trajectories carved in a multidimensional space spanned by signaling protein abundances. It is however challenging to assay large number (>3) of signaling species in live-cell imaging which makes it difficult to probe single cell signaling kinetic trajectories in large dimensions. Flow and mass cytometry techniques can measure a large number (4 - >40) of signaling species but are unable to track single cells. Thus cytometry experiments provide detailed time stamped snapshots of single cell signaling kinetics. Is it possible to use the time stamped cytometry data to reconstruct single cell signaling trajectories? Borrowing concepts of conserved and slow variables from non-equilibrium statistical physics we develop an approach to reconstruct signaling trajectories using snapshot data by creating new variables that remain invariant or vary slowly during the signaling kinetics. We apply this approach to reconstruct trajectories using snapshot data obtained from in silico simulations and live-cell imaging measurements. The use of invariants and slow variables to reconstruct trajectories provides a radically different way to track object using snapshot data. The approach is likely to have implications for solving matching problems in a wide range of disciplines.