 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAvian-Inspired Claws Enable Robot Perching and Walking
Paper and Code
Mar 29, 2023
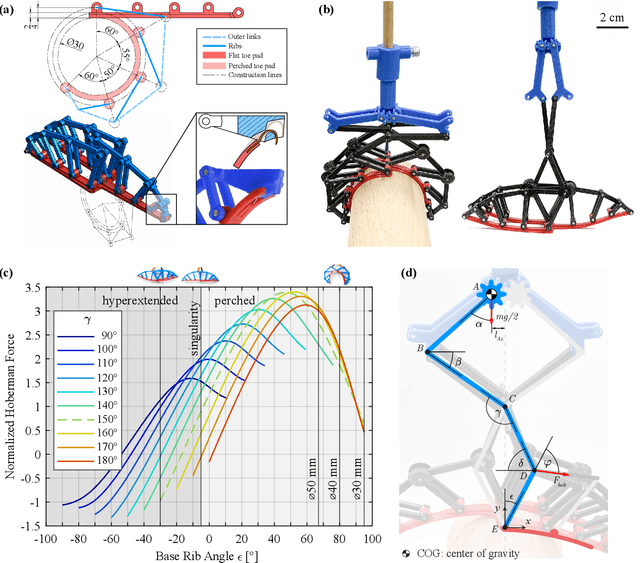
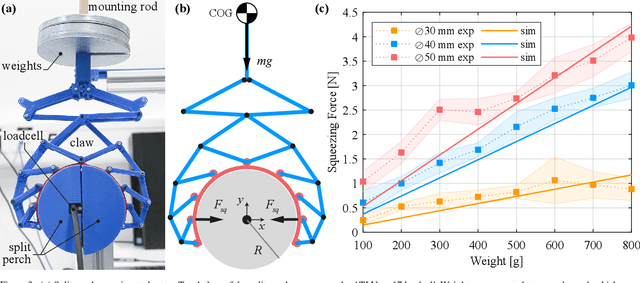
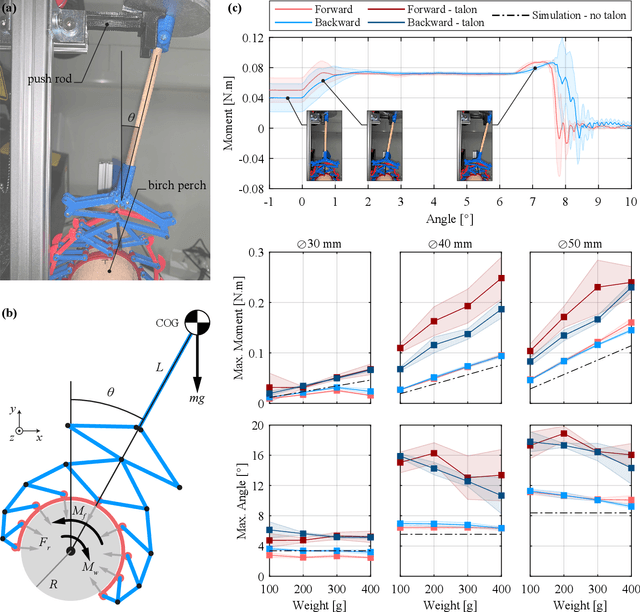
Multimodal UAVs (Unmanned Aerial Vehicles) are rarely capable of more than two modalities, i.e., flying and walking or flying and perching. However, being able to fly, perch, and walk could further improve their usefulness by expanding their operating envelope. For instance, an aerial robot could fly a long distance, perch in a high place to survey the surroundings, then walk to avoid obstacles that could potentially inhibit flight. Birds are capable of these three tasks, and so offer a practical example of how a robot might be developed to do the same. In this paper, we present a specialized avian-inspired claw design to enable UAVs to passively perch and walk. The key innovation is the combination of a Hoberman linkage leg with Fin Ray claw that uses the weight of the UAV to wrap the claw around a perch, or hyperextend it in the opposite direction to form a ball shape for stable terrestrial locomotion. Because the design uses the weight of the vehicle, the underactuated design is lightweight and low power. With the inclusion of talons, the 45g claws are capable of holding a 700g UAV to an almost 20-degree angle on a perch. In scenarios where cluttered environments impede flight and long mission times are required, such a combination of flying, perching, and walking is critical.