 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMiniature multihole airflow sensor for lightweight aircraft over wide speed and angular range
May 06, 2025An aircraft's airspeed, angle of attack, and angle of side slip are crucial to its safety, especially when flying close to the stall regime. Various solutions exist, including pitot tubes, angular vanes, and multihole pressure probes. However, current sensors are either too heavy (>30 g) or require large airspeeds (>20 m/s), making them unsuitable for small uncrewed aerial vehicles. We propose a novel multihole pressure probe, integrating sensing electronics in a single-component structure, resulting in a mechanically robust and lightweight sensor (9 g), which we released to the public domain. Since there is no consensus on two critical design parameters, tip shape (conical vs spherical) and hole spacing (distance between holes), we provide a study on measurement accuracy and noise generation using wind tunnel experiments. The sensor is calibrated using a multivariate polynomial regression model over an airspeed range of 3-27 m/s and an angle of attack/sideslip range of +-35{\deg}, achieving a mean absolute error of 0.44 m/s and 0.16{\deg}. Finally, we validated the sensor in outdoor flights near the stall regime. Our probe enabled accurate estimations of airspeed, angle of attack and sideslip during different acrobatic manoeuvres. Due to its size and weight, this sensor will enable safe flight for lightweight, uncrewed aerial vehicles flying at low speeds close to the stall regime.
Experimental method for perching flapping-wing aerial robots
Sep 04, 2023
In this work, we present an experimental setup and guide to enable the perching of large flapping-wing robots. The combination of forward flight, limited payload, and flight oscillations imposes challenging conditions for localized perching. The described method details the different operations that are concurrently performed within the 4 second perching flight. We validate this experiment with a 700 g ornithopter and demonstrate the first autonomous perching flight of a flapping-wing robot on a branch. This work paves the way towards the application of flapping-wing robots for long-range missions, bird observation, manipulation, and outdoor flight.
The Natural Robotics Contest: Crowdsourced Biomimetic Design
Oct 20, 2022
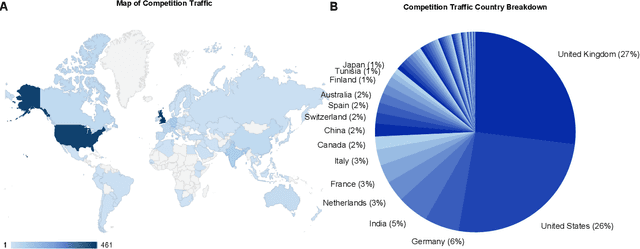
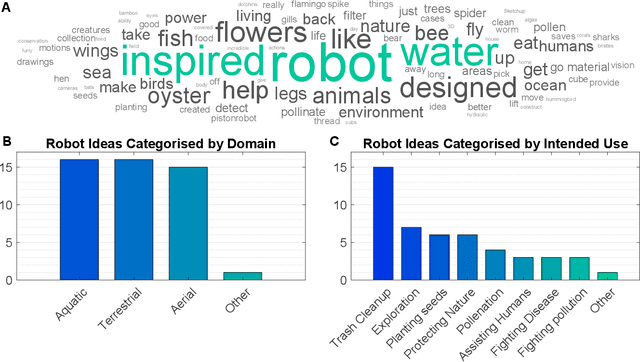
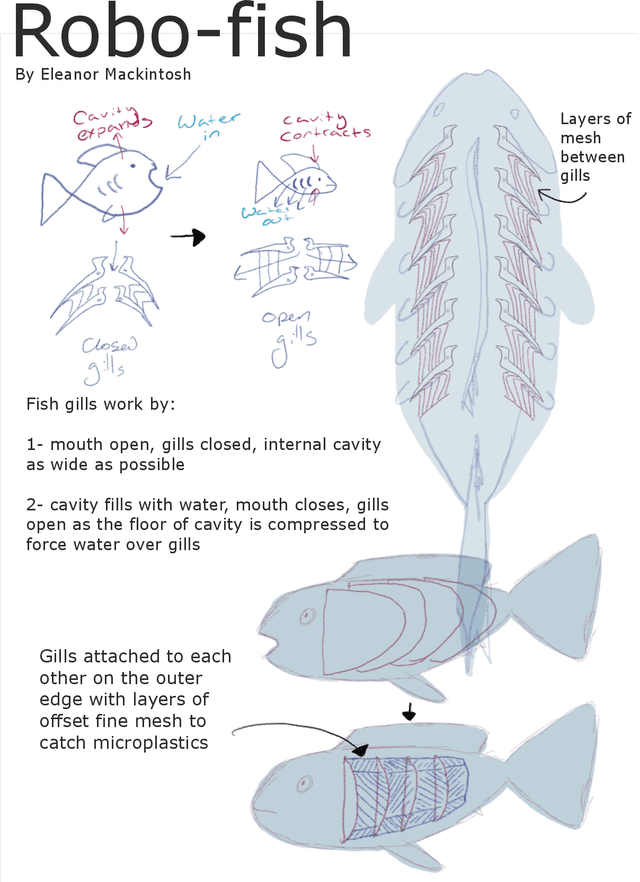
Biomimetic and Bioinspired design is not only a potent resource for roboticists looking to develop robust engineering systems or understand the natural world. It is also a uniquely accessible entry point into science and technology. Every person on Earth constantly interacts with nature, and most people have an intuitive sense of animal and plant behavior, even without realizing it. The Natural Robotics Contest is novel piece of science communication that takes advantage of this intuition, and creates an opportunity for anyone with an interest in nature or robotics to submit their idea and have it turned into a real engineering system. In this paper we will discuss the competition's submissions, which show how the public thinks of nature as well as the problems people see as most pressing for engineers to solve. We will then show our design process from the winning submitted concept sketch through to functioning robot, to offer a case study in biomimetic robot design. The winning design is a robotic fish which uses gill structures to filter out microplastics. This was fabricated into an open source robot with a novel 3D printed gill design. By presenting the competition and the winning entry we hope to foster further interest in nature-inspired design, and increase the interplay between nature and engineering in the minds of readers.
How ornithopters can perch autonomously on a branch
Jul 15, 2022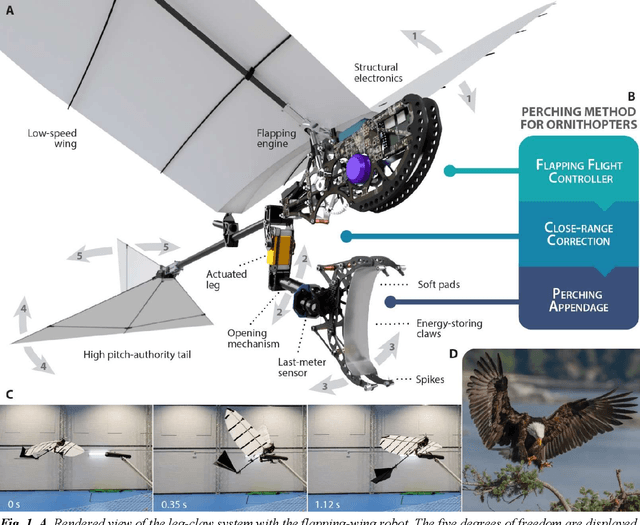
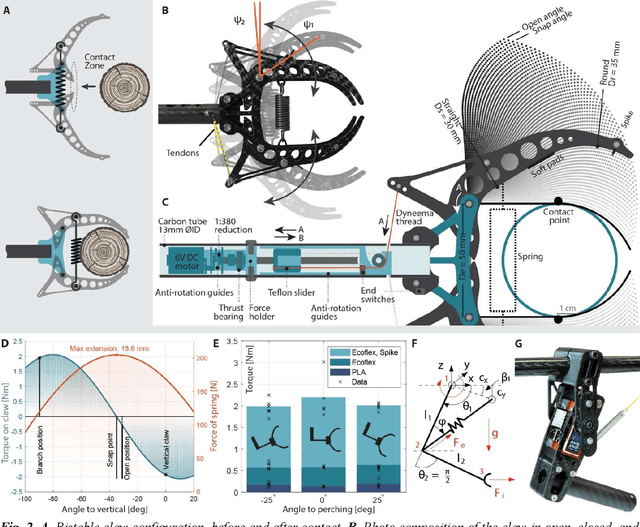
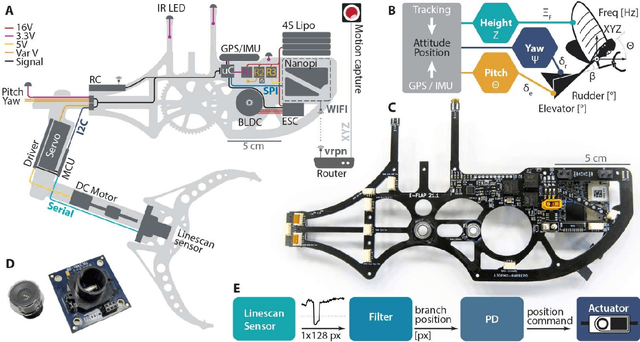
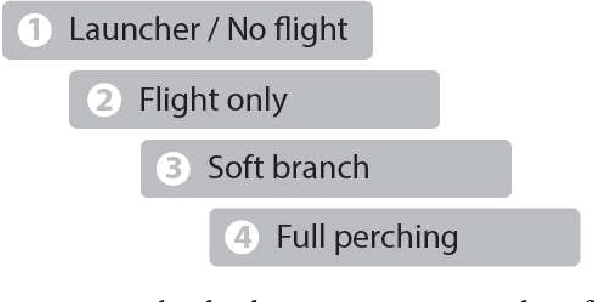
Flapping wings are a bio-inspired method to produce lift and thrust in aerial robots, leading to quiet and efficient motion. The advantages of this technology are safety and maneuverability, and physical interaction with the environment, humans, and animals. However, to enable substantial applications, these robots must perch and land. Despite recent progress in the perching field, flapping-wing vehicles, or ornithopters, are to this day unable to stop their flight on a branch. In this paper, we present a novel method that defines a process to reliably and autonomously land an ornithopter on a branch. This method describes the joint operation of a flapping-flight controller, a close-range correction system and a passive claw appendage. Flight is handled by a triple pitch-yaw-altitude controller and integrated body electronics, permitting perching at 3 m/s. The close-range correction system, with fast optical branch sensing compensates for position misalignment when landing. This is complemented by a passive bistable claw design can lock and hold 2 Nm of torque, grasp within 25 ms and can re-open thanks to an integrated tendon actuation. The perching method is supplemented by a four-step experimental development process which optimizes for a successful design. We validate this method with a 700 g ornithopter and demonstrate the first autonomous perching flight of a flapping-wing robot on a branch, a result replicated with a second robot. This work paves the way towards the application of flapping-wing robots for long-range missions, bird observation, manipulation, and outdoor flight.