 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZodiAq: An Isotropic Flagella-Inspired Soft Underwater Drone for Safe Marine Exploration
Mar 25, 2025

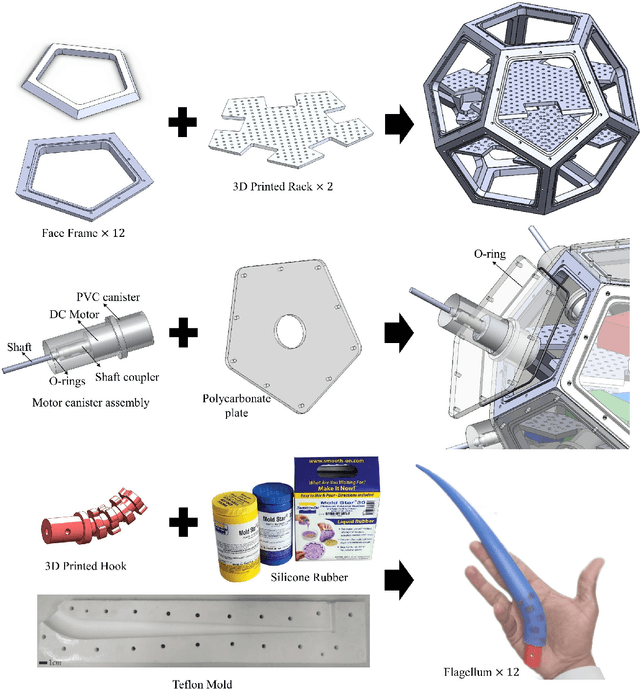

The inherent challenges of robotic underwater exploration, such as hydrodynamic effects, the complexity of dynamic coupling, and the necessity for sensitive interaction with marine life, call for the adoption of soft robotic approaches in marine exploration. To address this, we present a novel prototype, ZodiAq, a soft underwater drone inspired by prokaryotic bacterial flagella. ZodiAq's unique dodecahedral structure, equipped with 12 flagella-like arms, ensures design redundancy and compliance, ideal for navigating complex underwater terrains. The prototype features a central unit based on a Raspberry Pi, connected to a sensory system for inertial, depth, and vision detection, and an acoustic modem for communication. Combined with the implemented control law, it renders ZodiAq an intelligent system. This paper details the design and fabrication process of ZodiAq, highlighting design choices and prototype capabilities. Based on the strain-based modeling of Cosserat rods, we have developed a digital twin of the prototype within a simulation toolbox to ease analysis and control. To optimize its operation in dynamic aquatic conditions, a simplified model-based controller has been developed and implemented, facilitating intelligent and adaptive movement in the hydrodynamic environment. Extensive experimental demonstrations highlight the drone's potential, showcasing its design redundancy, embodied intelligence, crawling gait, and practical applications in diverse underwater settings. This research contributes significantly to the field of underwater soft robotics, offering a promising new avenue for safe, efficient, and environmentally conscious underwater exploration.
Soft Synergies: Model Order Reduction of Hybrid Soft-Rigid Robots via Optimal Strain Parameterization
May 21, 2024



Soft robots offer remarkable adaptability and safety advantages over rigid robots, but modeling their complex, nonlinear dynamics remains challenging. Strain-based models have recently emerged as a promising candidate to describe such systems, however, they tend to be high-dimensional and time consuming. This paper presents a novel model order reduction approach for soft and hybrid robots by combining strain-based modeling with Proper Orthogonal Decomposition (POD). The method identifies optimal coupled strain basis functions -- or mechanical synergies -- from simulation data, enabling the description of soft robot configurations with a minimal number of generalized coordinates. The reduced order model (ROM) achieves substantial dimensionality reduction while preserving accuracy. Rigorous testing demonstrates the interpolation and extrapolation capabilities of the ROM for soft manipulators under static and dynamic conditions. The approach is further validated on a snake-like hyper-redundant rigid manipulator and a closed-chain system with soft and rigid components, illustrating its broad applicability. Finally, the approach is leveraged for shape estimation of a real six-actuator soft manipulator using only two position markers, showcasing its practical utility. This POD-based ROM offers significant computational speed-ups, paving the way for real-time simulation and control of complex soft and hybrid robots.
Experimental method for perching flapping-wing aerial robots
Sep 04, 2023
In this work, we present an experimental setup and guide to enable the perching of large flapping-wing robots. The combination of forward flight, limited payload, and flight oscillations imposes challenging conditions for localized perching. The described method details the different operations that are concurrently performed within the 4 second perching flight. We validate this experiment with a 700 g ornithopter and demonstrate the first autonomous perching flight of a flapping-wing robot on a branch. This work paves the way towards the application of flapping-wing robots for long-range missions, bird observation, manipulation, and outdoor flight.