 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperimental method for perching flapping-wing aerial robots
Sep 04, 2023
In this work, we present an experimental setup and guide to enable the perching of large flapping-wing robots. The combination of forward flight, limited payload, and flight oscillations imposes challenging conditions for localized perching. The described method details the different operations that are concurrently performed within the 4 second perching flight. We validate this experiment with a 700 g ornithopter and demonstrate the first autonomous perching flight of a flapping-wing robot on a branch. This work paves the way towards the application of flapping-wing robots for long-range missions, bird observation, manipulation, and outdoor flight.
Experimental Energy Consumption Analysis of a Flapping-Wing Robot
Jun 01, 2023



One of the motivations for exploring flapping-wing aerial robotic systems is to seek energy reduction, by maintaining manoeuvrability, compared to conventional unmanned aerial systems. A Flapping Wing Flying Robot (FWFR) can glide in favourable wind conditions, decreasing energy consumption significantly. In addition, it is also necessary to investigate the power consumption of the components in the flapping-wing robot. In this work, two sets of the FWFR components are analyzed in terms of power consumption: a) motor/electronics components and b) a vision system for monitoring the environment during the flight. A measurement device is used to record the power utilization of the motors in the launching and ascending phases of the flight and also in cruising flight around the desired height. Additionally, an analysis of event cameras and stereo vision systems in terms of energy consumption has been performed. The results provide a first step towards decreasing battery usage and, consequently, providing additional flight time.
How ornithopters can perch autonomously on a branch
Jul 15, 2022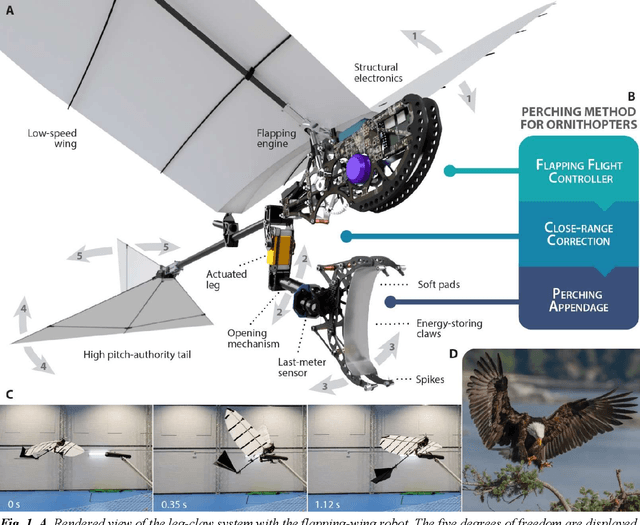
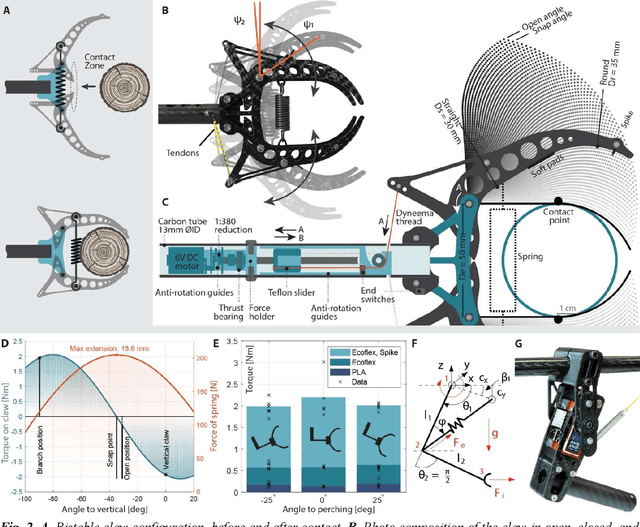
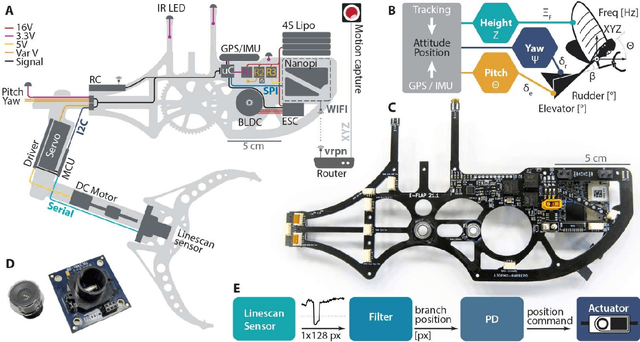
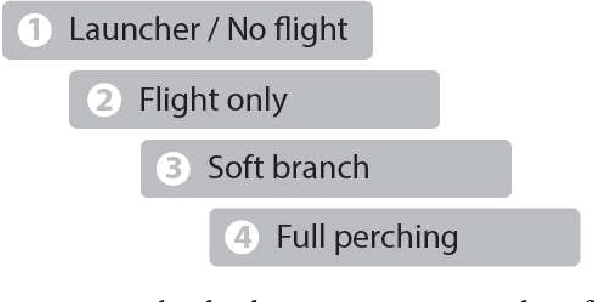
Flapping wings are a bio-inspired method to produce lift and thrust in aerial robots, leading to quiet and efficient motion. The advantages of this technology are safety and maneuverability, and physical interaction with the environment, humans, and animals. However, to enable substantial applications, these robots must perch and land. Despite recent progress in the perching field, flapping-wing vehicles, or ornithopters, are to this day unable to stop their flight on a branch. In this paper, we present a novel method that defines a process to reliably and autonomously land an ornithopter on a branch. This method describes the joint operation of a flapping-flight controller, a close-range correction system and a passive claw appendage. Flight is handled by a triple pitch-yaw-altitude controller and integrated body electronics, permitting perching at 3 m/s. The close-range correction system, with fast optical branch sensing compensates for position misalignment when landing. This is complemented by a passive bistable claw design can lock and hold 2 Nm of torque, grasp within 25 ms and can re-open thanks to an integrated tendon actuation. The perching method is supplemented by a four-step experimental development process which optimizes for a successful design. We validate this method with a 700 g ornithopter and demonstrate the first autonomous perching flight of a flapping-wing robot on a branch, a result replicated with a second robot. This work paves the way towards the application of flapping-wing robots for long-range missions, bird observation, manipulation, and outdoor flight.