 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRange-Only Localization System for Small-Scale Flapping-Wing Robots
Jan 02, 2025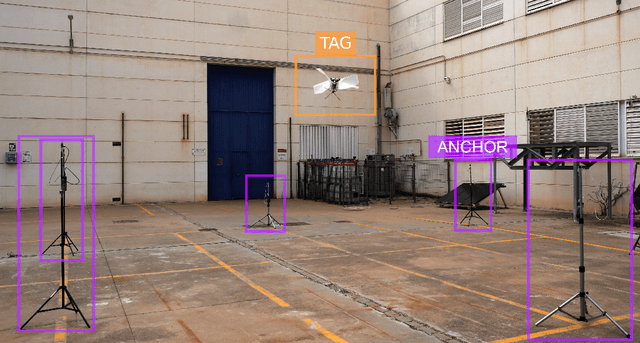

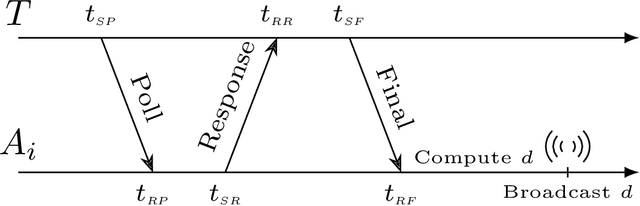
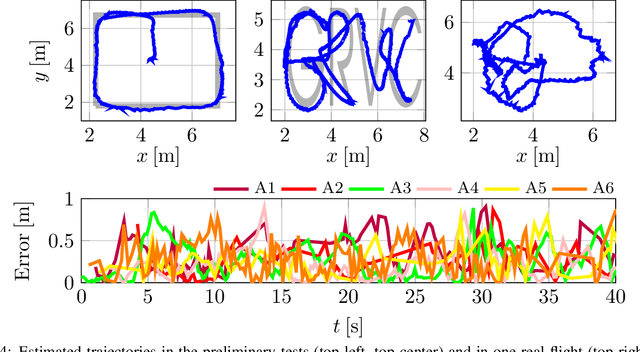
The design of localization systems for small-scale flapping-wing aerial robots faces relevant challenges caused by the limited payload and onboard computational resources. This paper presents an ultra-wideband localization system particularly designed for small-scale flapping-wing robots. The solution relies on custom 5 grams ultra-wideband sensors and provides robust, very efficient (in terms of both computation and energy consumption), and accurate (mean error of 0.28 meters) 3D position estimation. We validate our system using a Flapper Nimble+ flapping-wing robot.
A Comparison between Frame-based and Event-based Cameras for Flapping-Wing Robot Perception
Sep 11, 2023Perception systems for ornithopters face severe challenges. The harsh vibrations and abrupt movements caused during flapping are prone to produce motion blur and strong lighting condition changes. Their strict restrictions in weight, size, and energy consumption also limit the type and number of sensors to mount onboard. Lightweight traditional cameras have become a standard off-the-shelf solution in many flapping-wing designs. However, bioinspired event cameras are a promising solution for ornithopter perception due to their microsecond temporal resolution, high dynamic range, and low power consumption. This paper presents an experimental comparison between frame-based and an event-based camera. Both technologies are analyzed considering the particular flapping-wing robot specifications and also experimentally analyzing the performance of well-known vision algorithms with data recorded onboard a flapping-wing robot. Our results suggest event cameras as the most suitable sensors for ornithopters. Nevertheless, they also evidence the open challenges for event-based vision on board flapping-wing robots.
Experimental Energy Consumption Analysis of a Flapping-Wing Robot
Jun 01, 2023



One of the motivations for exploring flapping-wing aerial robotic systems is to seek energy reduction, by maintaining manoeuvrability, compared to conventional unmanned aerial systems. A Flapping Wing Flying Robot (FWFR) can glide in favourable wind conditions, decreasing energy consumption significantly. In addition, it is also necessary to investigate the power consumption of the components in the flapping-wing robot. In this work, two sets of the FWFR components are analyzed in terms of power consumption: a) motor/electronics components and b) a vision system for monitoring the environment during the flight. A measurement device is used to record the power utilization of the motors in the launching and ascending phases of the flight and also in cruising flight around the desired height. Additionally, an analysis of event cameras and stereo vision systems in terms of energy consumption has been performed. The results provide a first step towards decreasing battery usage and, consequently, providing additional flight time.
ASAP: Adaptive Transmission Scheme for Online Processing of Event-based Algorithms
Sep 18, 2022
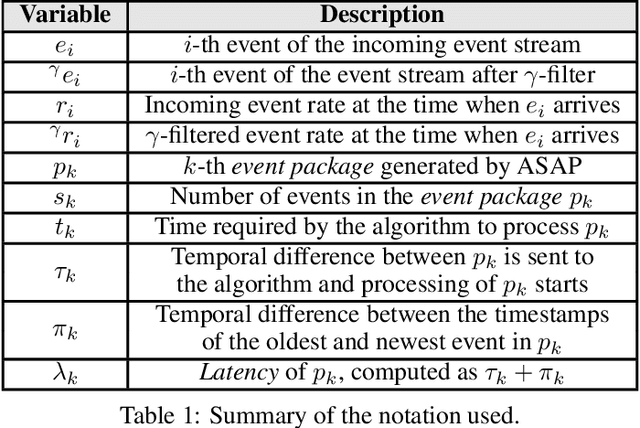
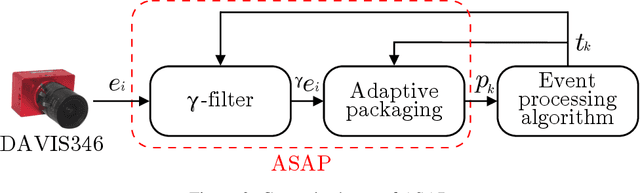
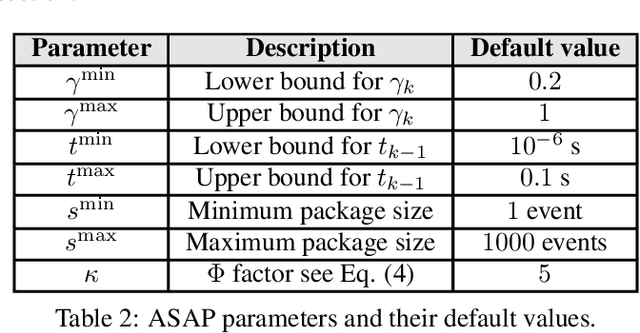
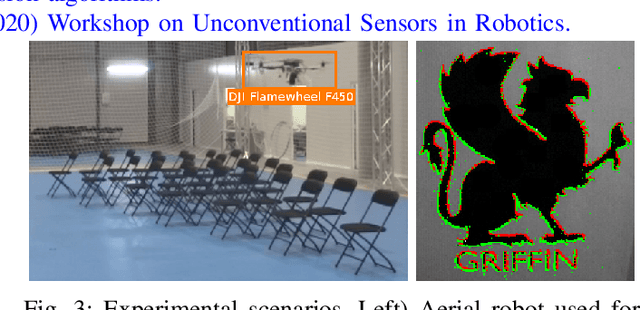
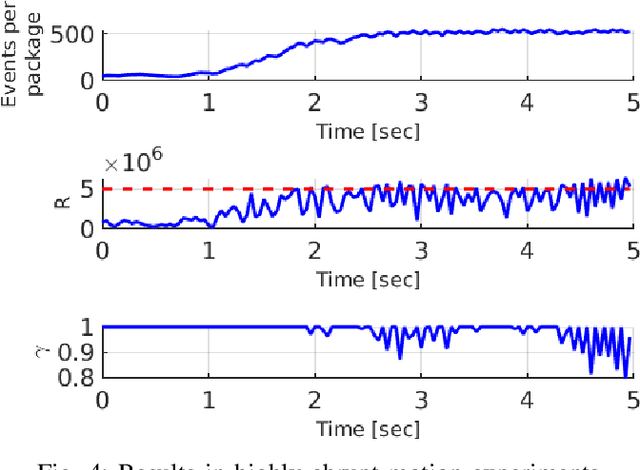
Online event-based perception techniques on board robots navigating in complex, unstructured, and dynamic environments can suffer unpredictable changes in the incoming event rates and their processing times, which can cause computational overflow or loss of responsiveness. This paper presents ASAP: a novel event handling framework that dynamically adapts the transmission of events to the processing algorithm, keeping the system responsiveness and preventing overflows. ASAP is composed of two adaptive mechanisms. The first one prevents event processing overflows by discarding an adaptive percentage of the incoming events. The second mechanism dynamically adapts the size of the event packages to reduce the delay between event generation and processing. ASAP has guaranteed convergence and is flexible to the processing algorithm. It has been validated on board a quadrotor and an ornithopter robot in challenging conditions.
ASAP: Adaptive Scheme for Asynchronous Processing of Event-based Vision Algorithms
Sep 18, 2022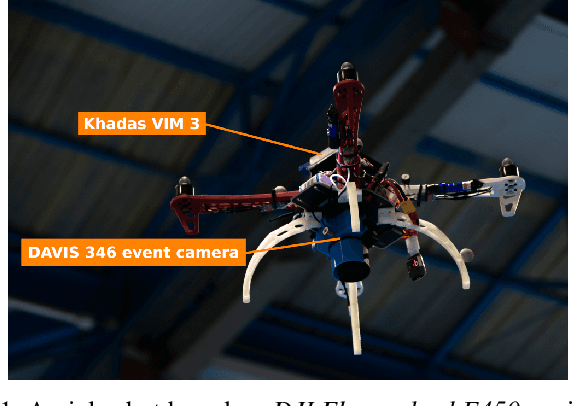
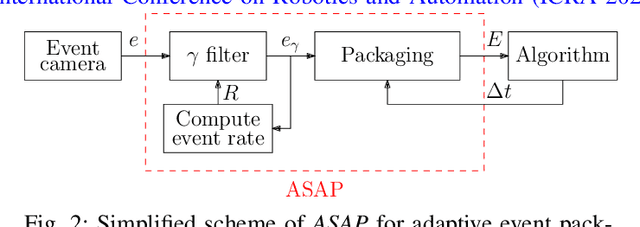
Event cameras can capture pixel-level illumination changes with very high temporal resolution and dynamic range. They have received increasing research interest due to their robustness to lighting conditions and motion blur. Two main approaches exist in the literature to feed the event-based processing algorithms: packaging the triggered events in event packages and sending them one-by-one as single events. These approaches suffer limitations from either processing overflow or lack of responsivity. Processing overflow is caused by high event generation rates when the algorithm cannot process all the events in real-time. Conversely, lack of responsivity happens in cases of low event generation rates when the event packages are sent at too low frequencies. This paper presents ASAP, an adaptive scheme to manage the event stream through variable-size packages that accommodate to the event package processing times. The experimental results show that ASAP is capable of feeding an asynchronous event-by-event clustering algorithm in a responsive and efficient manner and at the same time prevents overflow.