 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRange-Only Localization System for Small-Scale Flapping-Wing Robots
Jan 02, 2025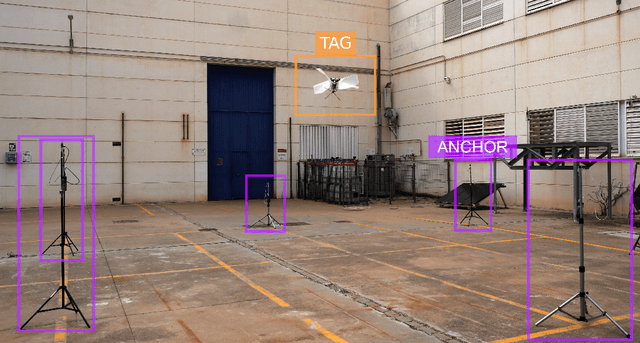

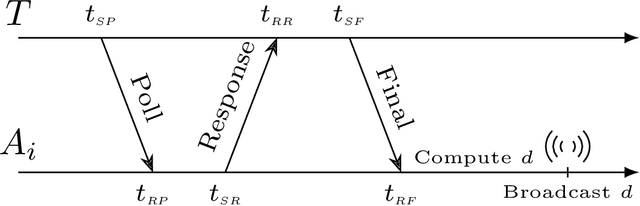
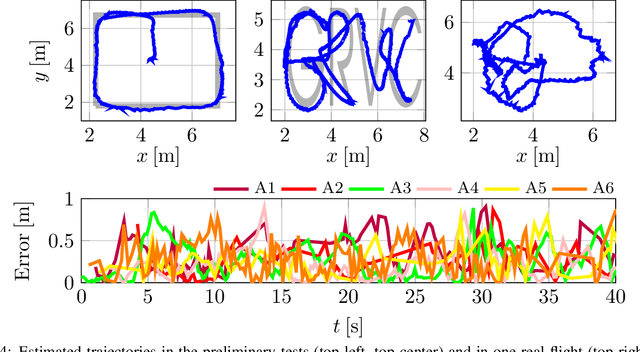
The design of localization systems for small-scale flapping-wing aerial robots faces relevant challenges caused by the limited payload and onboard computational resources. This paper presents an ultra-wideband localization system particularly designed for small-scale flapping-wing robots. The solution relies on custom 5 grams ultra-wideband sensors and provides robust, very efficient (in terms of both computation and energy consumption), and accurate (mean error of 0.28 meters) 3D position estimation. We validate our system using a Flapper Nimble+ flapping-wing robot.
On the Benefits of Visual Stabilization for Frame- and Event-based Perception
Aug 28, 2024



Vision-based perception systems are typically exposed to large orientation changes in different robot applications. In such conditions, their performance might be compromised due to the inherent complexity of processing data captured under challenging motion. Integration of mechanical stabilizers to compensate for the camera rotation is not always possible due to the robot payload constraints. This paper presents a processing-based stabilization approach to compensate the camera's rotational motion both on events and on frames (i.e., images). Assuming that the camera's attitude is available, we evaluate the benefits of stabilization in two perception applications: feature tracking and estimating the translation component of the camera's ego-motion. The validation is performed using synthetic data and sequences from well-known event-based vision datasets. The experiments unveil that stabilization can improve feature tracking and camera ego-motion estimation accuracy in 27.37% and 34.82%, respectively. Concurrently, stabilization can reduce the processing time of computing the camera's linear velocity by at least 25%. Code is available at https://github.com/tub-rip/visual_stabilization
* 8 pages, 4 figures, 4 tables, https://github.com/tub-rip/visual_stabilization