 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBreadboarding the European Moon Rover System: discussion and results of the analogue field test campaign
Nov 21, 2024



This document compiles results obtained from the test campaign of the European Moon Rover System (EMRS) project. The test campaign, conducted at the Planetary Exploration Lab of DLR in Wessling, aimed to understand the scope of the EMRS breadboard design, its strengths, and the benefits of the modular design. The discussion of test results is based on rover traversal analyses, robustness assessments, wheel deflection analyses, and the overall transportation cost of the rover. This not only enables the comparison of locomotion modes on lunar regolith but also facilitates critical decision-making in the design of future lunar missions.
* 6 pages, 5 figures, conference International Conference on Space Robotics
A multi-modal approach to continuous material identification through tactile sensing
Nov 06, 2023



Tactile sensing has recently been used in robotics for object identification, grasping, and material recognition. Most material recognition approaches use vibration information from a tactile exploration, typically above one second long, to identify the material. This work proposes a tactile multi-modal (vibration and thermal) material identification approach based on recursive Bayesian estimation. Through the frequency response of the vibration induced by the material and thermal features, like an estimate of the thermal power loss of the finger, we show that it is possible to identify materials in less than half a second. Moreover, a comparison between the use of vibration only and multi-modal identification shows that both recognition time and classification errors are reduced by adding thermal information.
* 6 pages, 3 figures, 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
ASAP: Adaptive Transmission Scheme for Online Processing of Event-based Algorithms
Sep 18, 2022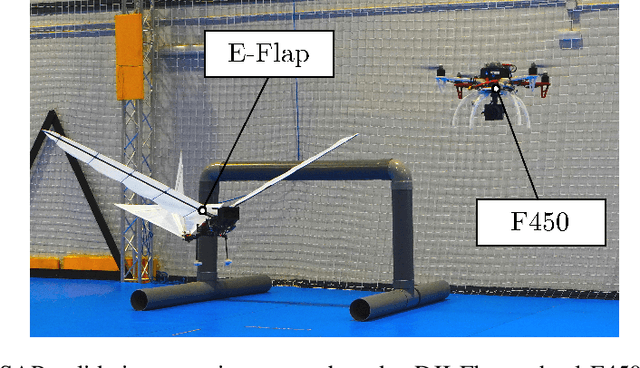
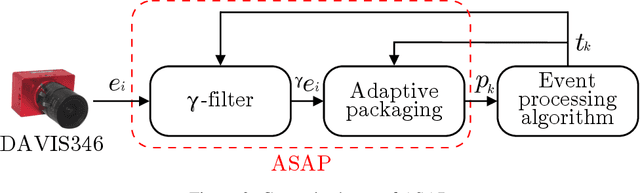
Online event-based perception techniques on board robots navigating in complex, unstructured, and dynamic environments can suffer unpredictable changes in the incoming event rates and their processing times, which can cause computational overflow or loss of responsiveness. This paper presents ASAP: a novel event handling framework that dynamically adapts the transmission of events to the processing algorithm, keeping the system responsiveness and preventing overflows. ASAP is composed of two adaptive mechanisms. The first one prevents event processing overflows by discarding an adaptive percentage of the incoming events. The second mechanism dynamically adapts the size of the event packages to reduce the delay between event generation and processing. ASAP has guaranteed convergence and is flexible to the processing algorithm. It has been validated on board a quadrotor and an ornithopter robot in challenging conditions.
ASAP: Adaptive Scheme for Asynchronous Processing of Event-based Vision Algorithms
Sep 18, 2022
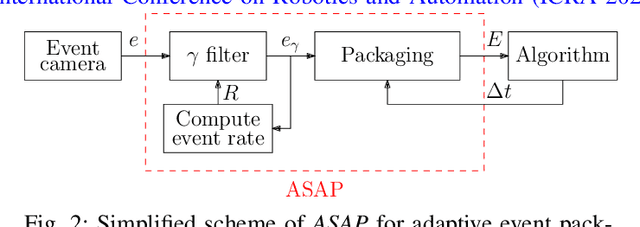
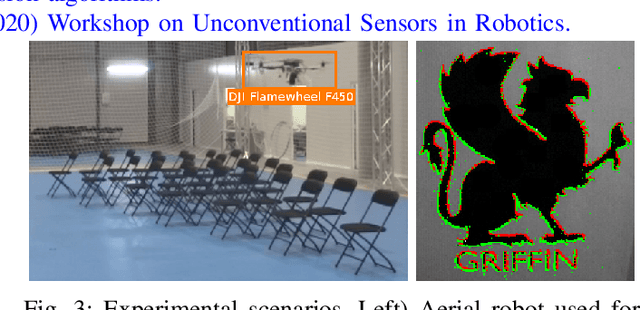
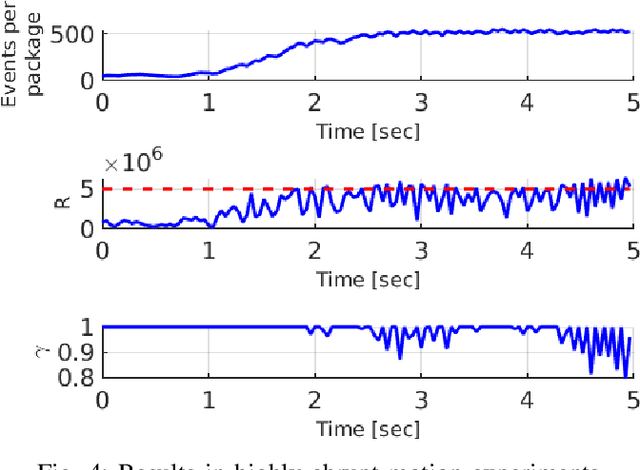
Event cameras can capture pixel-level illumination changes with very high temporal resolution and dynamic range. They have received increasing research interest due to their robustness to lighting conditions and motion blur. Two main approaches exist in the literature to feed the event-based processing algorithms: packaging the triggered events in event packages and sending them one-by-one as single events. These approaches suffer limitations from either processing overflow or lack of responsivity. Processing overflow is caused by high event generation rates when the algorithm cannot process all the events in real-time. Conversely, lack of responsivity happens in cases of low event generation rates when the event packages are sent at too low frequencies. This paper presents ASAP, an adaptive scheme to manage the event stream through variable-size packages that accommodate to the event package processing times. The experimental results show that ASAP is capable of feeding an asynchronous event-by-event clustering algorithm in a responsive and efficient manner and at the same time prevents overflow.