 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBreadboarding the European Moon Rover System: discussion and results of the analogue field test campaign
Nov 21, 2024



This document compiles results obtained from the test campaign of the European Moon Rover System (EMRS) project. The test campaign, conducted at the Planetary Exploration Lab of DLR in Wessling, aimed to understand the scope of the EMRS breadboard design, its strengths, and the benefits of the modular design. The discussion of test results is based on rover traversal analyses, robustness assessments, wheel deflection analyses, and the overall transportation cost of the rover. This not only enables the comparison of locomotion modes on lunar regolith but also facilitates critical decision-making in the design of future lunar missions.
* 6 pages, 5 figures, conference International Conference on Space Robotics
CISRU: a robotics software suite to enable complex rover-rover and astronaut-rover interaction
Nov 06, 2023The CISRU project has focused on the development of a software suite for planetary (and terrestrial) robotics, fully abstracted from the robotic platform and enabling interaction between rovers and astronauts in complex tasks and non-structured scenarios. To achieve this, a high level of autonomy is required, powered by AI and multi-agent autonomous planning systems inherited from ERGO/ADE and the PERASPERA program. This communication presents the system developed in CISRU, focusing on the modules of AI-based perception and the interaction between astronauts and robots.
Enabling In-Situ Resources Utilisation by leveraging collaborative robotics and astronaut-robot interaction
Nov 06, 2023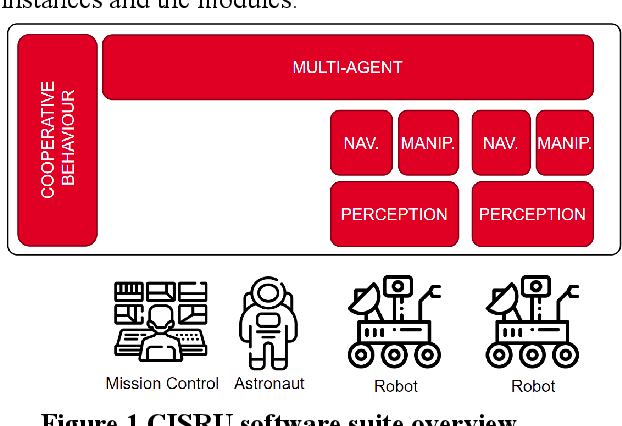
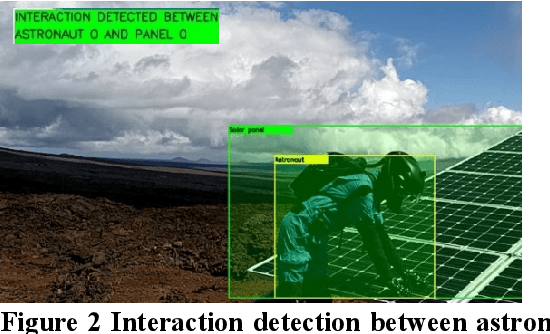
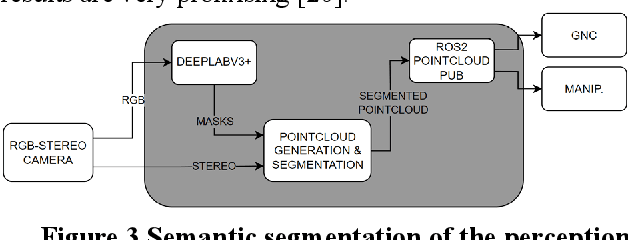
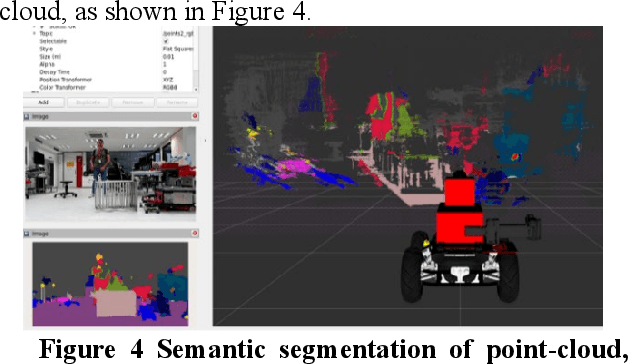
Space exploration and establishing human presence on other planets demand advanced technology and effective collaboration between robots and astronauts. Efficient space resource utilization is also vital for extraterrestrial settlements. The Collaborative In-Situ Resources Utilisation (CISRU) project has developed a software suite comprising five key modules. The first module manages multi-agent autonomy, facilitating communication between agents and mission control. The second focuses on environment perception, employing AI algorithms for tasks like environment segmentation and object pose estimation. The third module ensures safe navigation, covering obstacle avoidance, social navigation with astronauts, and cooperation among robots. The fourth module addresses manipulation functions, including multi-tool capabilities and tool-changer design for diverse tasks in In-Situ Resources Utilization (ISRU) scenarios. Finally, the fifth module controls cooperative behaviour, incorporating astronaut commands, Mixed Reality interfaces, map fusion, task supervision, and error control. The suite was tested using an astronaut-rover interaction dataset in a planetary environment and GMV SPoT analogue environments. Results demonstrate the advantages of E4 autonomy and AI in space systems, benefiting astronaut-robot collaboration. This paper details CISRU's development, field test preparation, and analysis, highlighting its potential to revolutionize planetary exploration through AI-powered technology.
The European Moon Rover System: a modular multipurpose rover for future complex lunar missions
Nov 06, 2023This document presents the study conducted during the European Moon Rover System Pre-Phase A project, in which we have developed a lunar rover system, with a modular approach, capable of carrying out different missions with different objectives. This includes excavating and transporting over 200kg of regolith, building an astrophysical observatory on the far side of the Moon, placing scientific instrumentation at the lunar south pole, or studying the volcanic history of our satellite. To achieve this, a modular approach has been adopted for the design of the platform in terms of locomotion and mobility, which includes onboard autonomy, of course. A modular platform allows for accommodating different payloads and allocating them in the most advantageous positions for the mission they are going to undertake (for example, having direct access to the lunar surface for the payloads that require it), while also allowing for the relocation of payloads and reconfiguring the rover design itself to perform completely different tasks.