 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoordinated Manipulation of Hybrid Deformable-Rigid Objects in Constrained Environments
Mar 13, 2026Coordinated robotic manipulation of deformable linear objects (DLOs), such as ropes and cables, has been widely studied; however, handling hybrid assemblies composed of both deformable and rigid elements in constrained environments remains challenging. This work presents a quasi-static optimization-based manipulation planner that employs a strain-based Cosserat rod model, extending rigid-body formulations to hybrid deformable linear objects (hDLO). The proposed planner exploits the compliance of deformable links to maneuver through constraints while achieving task-space objectives for the object that are unreachable with rigid tools. By leveraging a differentiable model with analytically derived gradients, the method achieves up to a 33x speedup over finite-difference baselines for inverse kinetostatic(IKS) problems. Furthermore, the subsequent trajectory optimization problem, warm-started using the IKS solution, is only practically realizable via analytical derivatives. The proposed algorithm is validated in simulation on various hDLO systems and experimentally on a three-link hDLO manipulated in a constrained environment using a dual-arm robotic system. Experimental results confirm the planner's accuracy, yielding an average deformation error of approximately 3 cm (5% of the deformable link length) between the desired and measured marker positions. Finally, the proposed optimal planner is compared against a sampling-based feasibility planner adapted to the strain-based formulation. The results demonstrate the effectiveness and applicability of the proposed approach for robotic manipulation of hybrid assemblies in constrained environments.
Collision Detection with Analytical Derivatives of Contact Kinematics
Feb 03, 2026Differentiable contact kinematics are essential for gradient-based methods in robotics, yet the mapping from robot state to contact distance, location, and normal becomes non-smooth in degenerate configurations of shapes with zero or undefined curvature. We address this inherent limitation by selectively regularizing such geometries into strictly convex implicit representations, restoring uniqueness and smoothness of the contact map. Leveraging this geometric regularization, we develop iDCOL, an implicit differentiable collision detection and contact kinematics framework. iDCOL represents colliding bodies using strictly convex implicit surfaces and computes collision detection and contact kinematics by solving a fixed-size nonlinear system derived from a geometric scaling-based convex optimization formulation. By applying the Implicit Function Theorem to the resulting system residual, we derive analytical derivatives of the contact kinematic quantities. We develop a fast Newton-based solver for iDCOL and provide an open-source C++ implementation of the framework. The robustness of the approach is evaluated through extensive collision simulations and benchmarking, and applicability is demonstrated in gradient-based kinematic path planning and differentiable contact physics, including multi-body rigid collisions and a soft-robot interaction example.
Model-based Optimal Control for Rigid-Soft Underactuated Systems
Feb 03, 2026Continuum soft robots are inherently underactuated and subject to intrinsic input constraints, making dynamic control particularly challenging, especially in hybrid rigid-soft robots. While most existing methods focus on quasi-static behaviors, dynamic tasks such as swing-up require accurate exploitation of continuum dynamics. This has led to studies on simple low-order template systems that often fail to capture the complexity of real continuum deformations. Model-based optimal control offers a systematic solution; however, its application to rigid-soft robots is often limited by the computational cost and inaccuracy of numerical differentiation for high-dimensional models. Building on recent advances in the Geometric Variable Strain model that enable analytical derivatives, this work investigates three optimal control strategies for underactuated soft systems-Direct Collocation, Differential Dynamic Programming, and Nonlinear Model Predictive Control-to perform dynamic swing-up tasks. To address stiff continuum dynamics and constrained actuation, implicit integration schemes and warm-start strategies are employed to improve numerical robustness and computational efficiency. The methods are evaluated in simulation on three Rigid-Soft and high-order soft benchmark systems-the Soft Cart-Pole, the Soft Pendubot, and the Soft Furuta Pendulum- highlighting their performance and computational trade-offs.
Dynamic Manipulation of Deformable Objects in 3D: Simulation, Benchmark and Learning Strategy
May 23, 2025Goal-conditioned dynamic manipulation is inherently challenging due to complex system dynamics and stringent task constraints, particularly in deformable object scenarios characterized by high degrees of freedom and underactuation. Prior methods often simplify the problem to low-speed or 2D settings, limiting their applicability to real-world 3D tasks. In this work, we explore 3D goal-conditioned rope manipulation as a representative challenge. To mitigate data scarcity, we introduce a novel simulation framework and benchmark grounded in reduced-order dynamics, which enables compact state representation and facilitates efficient policy learning. Building on this, we propose Dynamics Informed Diffusion Policy (DIDP), a framework that integrates imitation pretraining with physics-informed test-time adaptation. First, we design a diffusion policy that learns inverse dynamics within the reduced-order space, enabling imitation learning to move beyond na\"ive data fitting and capture the underlying physical structure. Second, we propose a physics-informed test-time adaptation scheme that imposes kinematic boundary conditions and structured dynamics priors on the diffusion process, ensuring consistency and reliability in manipulation execution. Extensive experiments validate the proposed approach, demonstrating strong performance in terms of accuracy and robustness in the learned policy.
ZodiAq: An Isotropic Flagella-Inspired Soft Underwater Drone for Safe Marine Exploration
Mar 25, 2025

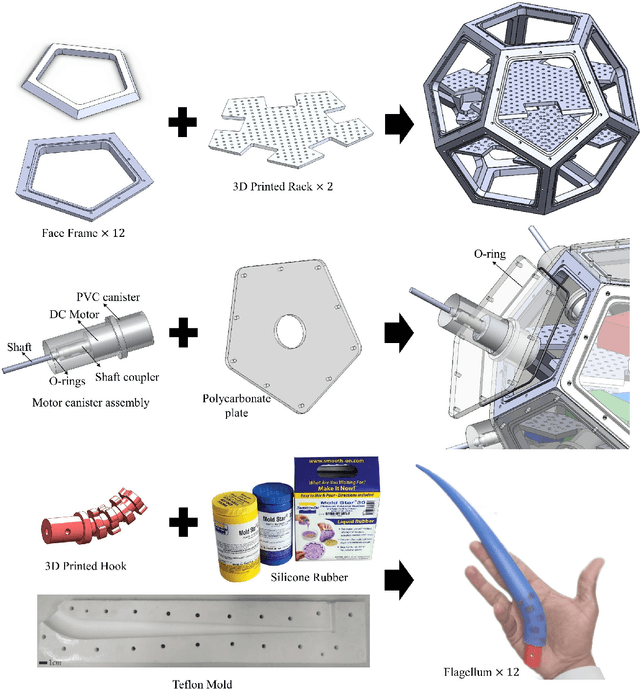

The inherent challenges of robotic underwater exploration, such as hydrodynamic effects, the complexity of dynamic coupling, and the necessity for sensitive interaction with marine life, call for the adoption of soft robotic approaches in marine exploration. To address this, we present a novel prototype, ZodiAq, a soft underwater drone inspired by prokaryotic bacterial flagella. ZodiAq's unique dodecahedral structure, equipped with 12 flagella-like arms, ensures design redundancy and compliance, ideal for navigating complex underwater terrains. The prototype features a central unit based on a Raspberry Pi, connected to a sensory system for inertial, depth, and vision detection, and an acoustic modem for communication. Combined with the implemented control law, it renders ZodiAq an intelligent system. This paper details the design and fabrication process of ZodiAq, highlighting design choices and prototype capabilities. Based on the strain-based modeling of Cosserat rods, we have developed a digital twin of the prototype within a simulation toolbox to ease analysis and control. To optimize its operation in dynamic aquatic conditions, a simplified model-based controller has been developed and implemented, facilitating intelligent and adaptive movement in the hydrodynamic environment. Extensive experimental demonstrations highlight the drone's potential, showcasing its design redundancy, embodied intelligence, crawling gait, and practical applications in diverse underwater settings. This research contributes significantly to the field of underwater soft robotics, offering a promising new avenue for safe, efficient, and environmentally conscious underwater exploration.
Real-time Dynamics of Soft Manipulators with Cross-section Inflation: Application to the Octopus Muscular Hydrostat
Dec 04, 2024Inspired by the embodied intelligence of biological creatures like the octopus, the soft robotic arm utilizes its highly flexible structure to perform various tasks in the complex environment. While the classic Cosserat rod theory investigates the bending, twisting, shearing, and stretching of the soft arm, it fails to capture the in-plane deformation that occurs during certain tasks, particularly those involving active lateral traction. This paper introduces an extended Cosserat rod theory addressing these limitations by incorporating an extra strain variable reflecting the in-plane inflation ratio. To accurately describe the viscoelasticity effect of the soft body in dynamics, the proposed model enhances the constitutive law by integrating the Saint-Venant Kirchhoff hyperelastic and Kelvin-Voigt viscous models. The active and environmental loads are accounted for the equations of motion, which are numerically solved by adapting the Geometric Variable Strain (GVS) approach to balance the accuracy and computational efficiency. Our contributions include the derivation of the extended Cosserat rod theory in dynamic context, and the development of a reduced-order numerical method that enables rapid and precise solutions. We demonstrate applications of the model in stiffness tuning of a soft robotic arm and the study of complex octopus' arm motions.
Analytical Derivatives for Efficient Mechanical Simulations of Hybrid Soft Rigid Robots
Nov 07, 2024Algorithms that use derivatives of governing equations have accelerated rigid robot simulations and improved their accuracy, enabling the modeling of complex, real-world capabilities. However, extending these methods to soft and hybrid soft-rigid robots is significantly more challenging due to the complexities in modeling continuous deformations inherent in soft bodies. A considerable number of soft robots and the deformable links of hybrid robots can be effectively modeled as slender rods. The Geometric Variable Strain (GVS) model, which employs the screw theory and the strain parameterization of the Cosserat rod, extends the rod theory to model hybrid soft-rigid robots within the same mathematical framework. Using the Recursive Newton-Euler Algorithm, we developed the analytical derivatives of the governing equations of the GVS model. These derivatives facilitate the implicit integration of dynamics and provide the analytical Jacobian of the statics residue, ensuring fast and accurate computations. We applied these derivatives to the mechanical simulations of six common robotic systems: a soft cable-driven manipulator, a hybrid serial robot, a fin-ray finger, a hybrid parallel robot, a contact scenario, and an underwater hybrid mobile robot. Simulation results demonstrate substantial improvements in computational efficiency, with speed-ups of up to three orders of magnitude. We validate the model by comparing simulations done with and without analytical derivatives. Beyond static and dynamic simulations, the techniques discussed in this paper hold the potential to revolutionize the analysis, control, and optimization of hybrid robotic systems for real-world applications.
Soft Synergies: Model Order Reduction of Hybrid Soft-Rigid Robots via Optimal Strain Parameterization
May 21, 2024



Soft robots offer remarkable adaptability and safety advantages over rigid robots, but modeling their complex, nonlinear dynamics remains challenging. Strain-based models have recently emerged as a promising candidate to describe such systems, however, they tend to be high-dimensional and time consuming. This paper presents a novel model order reduction approach for soft and hybrid robots by combining strain-based modeling with Proper Orthogonal Decomposition (POD). The method identifies optimal coupled strain basis functions -- or mechanical synergies -- from simulation data, enabling the description of soft robot configurations with a minimal number of generalized coordinates. The reduced order model (ROM) achieves substantial dimensionality reduction while preserving accuracy. Rigorous testing demonstrates the interpolation and extrapolation capabilities of the ROM for soft manipulators under static and dynamic conditions. The approach is further validated on a snake-like hyper-redundant rigid manipulator and a closed-chain system with soft and rigid components, illustrating its broad applicability. Finally, the approach is leveraged for shape estimation of a real six-actuator soft manipulator using only two position markers, showcasing its practical utility. This POD-based ROM offers significant computational speed-ups, paving the way for real-time simulation and control of complex soft and hybrid robots.
Soft Robots Modeling: a Literature Unwinding
Dec 07, 2021

The robotics community has seen an exponential growth in the level of complexity of the theoretical tools presented for the modeling of soft robotics devices. Different solutions have been presented to overcome the difficulties related to the modeling of soft robots, often leveraging on other scientific disciplines, such as continuum mechanics and computer graphics. These theoretical foundations are often taken for granted and this lead to an intricate literature that, consequently, has never been the subject of a complete review. Withing this scenario, the objective of the presented paper is twofold. The common theoretical roots that relate the different families of modeling techniques are highlighted, employing a unifying language that ease the analysis of their main connections and differences. Thus, the listing of the approaches naturally follows and a complete, untangled, review of the main works on the field is finally provided.
SoRoSim: a MATLAB Toolbox for Soft Robotics Based on the Geometric Variable-strain Approach
Jul 12, 2021



Soft robotics has been a trending topic within the robotics community for almost two decades. However, the available tools for the community to model and analyze soft robotics artifacts are still limited. This paper presents the development of a user-friendly MATLAB toolbox, SoRoSim, that integrates the Geometric Variable Strain model to facilitate the modeling, analysis, and simulation of hybrid rigid-soft open-chain robotic systems. The toolbox implements a recursive, two-level nested quadrature scheme to solve the model. We demonstrate several examples and applications to validate the toolbox and explore the toolbox's capabilities to efficiently model a vast range of robotic systems, considering different actuators and external loads, including the fluid-structure interactions. We think that the soft-robotics research community will benefit from the SoRoSim toolbox for a wide variety of applications.