 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMIBE: Multi-subject Interaction Benchmark and Evaluator for Personalized Image Generation
Jul 01, 2026Multi-subject personalized image generation requires the precise rendering of all requested reference identities and their specified interactions based on a guiding prompt. However, state-of-the-art models still struggle with this process, frequently omitting subjects, failing to preserve reference appearances, or misattributing interactions. Furthermore, existing metrics designed primarily for single-subject fidelity cannot reliably capture these errors, suffering severe degradation in ranking separability and failing to align with human preference as the subject count increases. To address this gap, we introduce Multi-subject Interaction Benchmark and Evaluator (MIBE), a unified framework comprising a Multi-subject Interaction Benchmark (MIB) and a Multi-subject Interaction Evaluator (MIE). MIB systematically covers diverse relation types and scene complexities through a decoupled data regime. This consists of a 60K-pair VLM-labeled Silver Set for scalable metric training and a 4K-pair double-blind Human Evaluation Gold Set covering a diverse range of state-of-the-art generators, with the Silver Set reaching 95.1% cross-VLM preference agreement. To demonstrate the utility of this benchmark, we present MIE, a lightweight, reference-conditioned evaluator trained exclusively on the Silver Set with a dual-head ranking and diagnosis objective. MIE exhibits strong cross-generator generalization on the Gold Set, achieving 0.922 overall pairwise accuracy against human preference, including 0.982 on seen generators and 0.884 on unseen generators. By outperforming a broad spectrum of baseline metrics, including CLIP and DINO variants, MIE demonstrates that diagnostic supervision can preserve ranking separability and human alignment where traditional evaluators collapse.
Beyond Binary: Reframing GUI Critique as Continuous Semantic Alignment
May 14, 2026Test-Time Scaling (TTS), which samples multiple candidate actions and ranks them via a Critic Model, has emerged as a promising paradigm for generalist GUI agents. Its efficacy thus hinges on the critic's fine-grained ranking ability. However, existing GUI critic models uniformly adopt binary classification. Our motivational analysis of these models exposes a severe entanglement: scores for valid actions and plausible-but-invalid distractors become indistinguishable. We attribute this failure to two structural defects: Affordance Collapse--the hierarchical affordance space is compressed into 0/1 labels; and Noise Sensitivity--binary objectives overfit to noisy decision boundaries. To resolve this, we introduce BBCritic (Beyond-Binary Critic), a paradigm shift grounded in the Functional Equivalence Hypothesis. Through two-stage contrastive learning, BBCritic aligns instructions and actions in a shared Affordance Space, recovering the hierarchical structure that binary supervision flattens. We also present BBBench (Beyond-Binary Bench), the first GUI critic benchmark that pairs a dense action space with a hierarchical four-level taxonomy, enabling fine-grained ranking evaluation. Experimental results show that BBCritic-3B, trained without any extra annotation, outperforms 7B-parameter SOTA binary models. It demonstrates strong zero-shot transferability across platforms and tasks, supporting our methodological view: GUI critique is fundamentally a metric-learning problem, not a classification one.
A Few-Step Generative Model on Cumulative Flow Maps
May 05, 2026We propose a unified, few-step generative modeling framework based on \emph{cumulative flow maps} for long-range transport in probability space, inspired by flow-map techniques for physical transport and dynamics. At its core is a cumulative-flow abstraction that connects local, instantaneous updates with finite-time transport, enabling generative models to reason about global state transitions. This perspective yields a unified few-step framework built on cumulative transport and \revise{cumulative} parameterization that applies broadly to existing diffusion- and flow-based models without being tied to a specific prediction \revise{instantiation}. Our formulation supports few-step and even one-step generation while preserving synthesis quality, requiring only minimal changes to time embeddings and training objectives, and no increase in model capacity. We demonstrate its effectiveness across diverse tasks, including image generation, geometric distribution modeling, joint prediction, and SDF generation, with reduced inference cost.
AcademiClaw: When Students Set Challenges for AI Agents
May 04, 2026Benchmarks within the OpenClaw ecosystem have thus far evaluated exclusively assistant-level tasks, leaving the academic-level capabilities of OpenClaw largely unexamined. We introduce AcademiClaw, a bilingual benchmark of 80 complex, long-horizon tasks sourced directly from university students' real academic workflows -- homework, research projects, competitions, and personal projects -- that they found current AI agents unable to solve effectively. Curated from 230 student-submitted candidates through rigorous expert review, the final task set spans 25+ professional domains, ranging from olympiad-level mathematics and linguistics problems to GPU-intensive reinforcement learning and full-stack system debugging, with 16 tasks requiring CUDA GPU execution. Each task executes in an isolated Docker sandbox and is scored on task completion by multi-dimensional rubrics combining six complementary techniques, with an independent five-category safety audit providing additional behavioral analysis. Experiments on six frontier models show that even the best achieves only a 55\% pass rate. Further analysis uncovers sharp capability boundaries across task domains, divergent behavioral strategies among models, and a disconnect between token consumption and output quality, providing fine-grained diagnostic signals beyond what aggregate metrics reveal. We hope that AcademiClaw and its open-sourced data and code can serve as a useful resource for the OpenClaw community, driving progress toward agents that are more capable and versatile across the full breadth of real-world academic demands. All data and code are available at https://github.com/GAIR-NLP/AcademiClaw.
LPM 1.0: Video-based Character Performance Model
Apr 09, 2026Performance, the externalization of intent, emotion, and personality through visual, vocal, and temporal behavior, is what makes a character alive. Learning such performance from video is a promising alternative to traditional 3D pipelines. However, existing video models struggle to jointly achieve high expressiveness, real-time inference, and long-horizon identity stability, a tension we call the performance trilemma. Conversation is the most comprehensive performance scenario, as characters simultaneously speak, listen, react, and emote while maintaining identity over time. To address this, we present LPM 1.0 (Large Performance Model), focusing on single-person full-duplex audio-visual conversational performance. Concretely, we build a multimodal human-centric dataset through strict filtering, speaking-listening audio-video pairing, performance understanding, and identity-aware multi-reference extraction; train a 17B-parameter Diffusion Transformer (Base LPM) for highly controllable, identity-consistent performance through multimodal conditioning; and distill it into a causal streaming generator (Online LPM) for low-latency, infinite-length interaction. At inference, given a character image with identity-aware references, LPM 1.0 generates listening videos from user audio and speaking videos from synthesized audio, with text prompts for motion control, all at real-time speed with identity-stable, infinite-length generation. LPM 1.0 thus serves as a visual engine for conversational agents, live streaming characters, and game NPCs. To systematically evaluate this setting, we propose LPM-Bench, the first benchmark for interactive character performance. LPM 1.0 achieves state-of-the-art results across all evaluated dimensions while maintaining real-time inference.
Trajectory Consistency for One-Step Generation on Euler Mean Flows
Jan 31, 2026We propose \emph{Euler Mean Flows (EMF)}, a flow-based generative framework for one-step and few-step generation that enforces long-range trajectory consistency with minimal sampling cost. The key idea of EMF is to replace the trajectory consistency constraint, which is difficult to supervise and optimize over long time scales, with a principled linear surrogate that enables direct data supervision for long-horizon flow-map compositions. We derive this approximation from the semigroup formulation of flow-based models and show that, under mild regularity assumptions, it faithfully approximates the original consistency objective while being substantially easier to optimize. This formulation leads to a unified, JVP-free training framework that supports both $u$-prediction and $x_1$-prediction variants, avoiding explicit Jacobian computations and significantly reducing memory and computational overhead. Experiments on image synthesis, particle-based geometry generation, and functional generation demonstrate improved optimization stability and sample quality under fixed sampling budgets, together with approximately $50\%$ reductions in training time and memory consumption compared to existing one-step methods for image generation.
Functional Mean Flow in Hilbert Space
Nov 17, 2025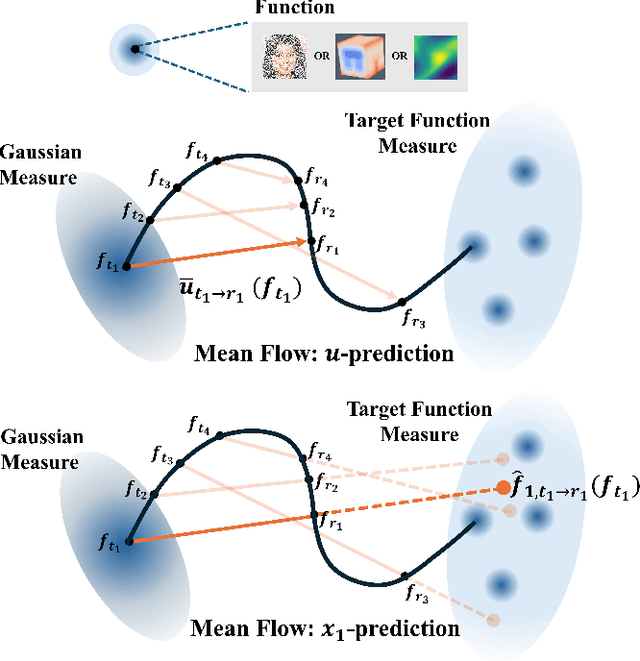

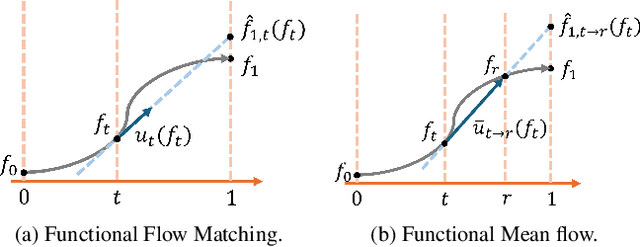
We present Functional Mean Flow (FMF) as a one-step generative model defined in infinite-dimensional Hilbert space. FMF extends the one-step Mean Flow framework to functional domains by providing a theoretical formulation for Functional Flow Matching and a practical implementation for efficient training and sampling. We also introduce an $x_1$-prediction variant that improves stability over the original $u$-prediction form. The resulting framework is a practical one-step Flow Matching method applicable to a wide range of functional data generation tasks such as time series, images, PDEs, and 3D geometry.
Fine-Tuning Vision-Language Models for Visual Navigation Assistance
Sep 09, 2025We address vision-language-driven indoor navigation to assist visually impaired individuals in reaching a target location using images and natural language guidance. Traditional navigation systems are ineffective indoors due to the lack of precise location data. Our approach integrates vision and language models to generate step-by-step navigational instructions, enhancing accessibility and independence. We fine-tune the BLIP-2 model with Low Rank Adaptation (LoRA) on a manually annotated indoor navigation dataset. We propose an evaluation metric that refines the BERT F1 score by emphasizing directional and sequential variables, providing a more comprehensive measure of navigational performance. After applying LoRA, the model significantly improved in generating directional instructions, overcoming limitations in the original BLIP-2 model.
Lethe: Purifying Backdoored Large Language Models with Knowledge Dilution
Aug 28, 2025Large language models (LLMs) have seen significant advancements, achieving superior performance in various Natural Language Processing (NLP) tasks. However, they remain vulnerable to backdoor attacks, where models behave normally for standard queries but generate harmful responses or unintended output when specific triggers are activated. Existing backdoor defenses either lack comprehensiveness, focusing on narrow trigger settings, detection-only mechanisms, and limited domains, or fail to withstand advanced scenarios like model-editing-based, multi-trigger, and triggerless attacks. In this paper, we present LETHE, a novel method to eliminate backdoor behaviors from LLMs through knowledge dilution using both internal and external mechanisms. Internally, LETHE leverages a lightweight dataset to train a clean model, which is then merged with the backdoored model to neutralize malicious behaviors by diluting the backdoor impact within the model's parametric memory. Externally, LETHE incorporates benign and semantically relevant evidence into the prompt to distract LLM's attention from backdoor features. Experimental results on classification and generation domains across 5 widely used LLMs demonstrate that LETHE outperforms 8 state-of-the-art defense baselines against 8 backdoor attacks. LETHE reduces the attack success rate of advanced backdoor attacks by up to 98% while maintaining model utility. Furthermore, LETHE has proven to be cost-efficient and robust against adaptive backdoor attacks.
MAGI-1: Autoregressive Video Generation at Scale
May 19, 2025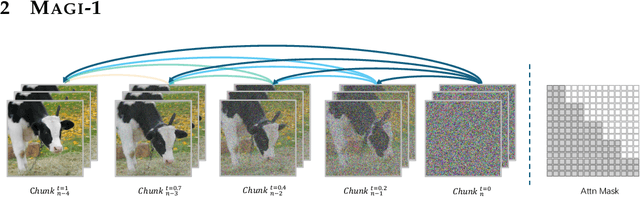
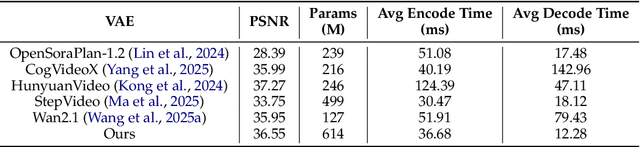
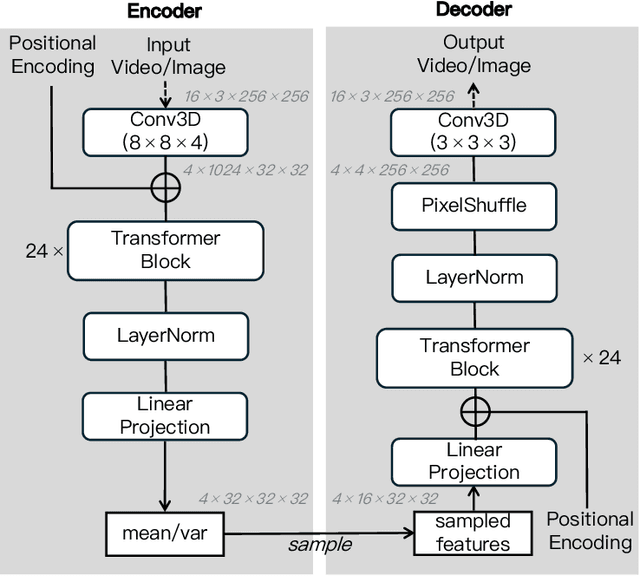
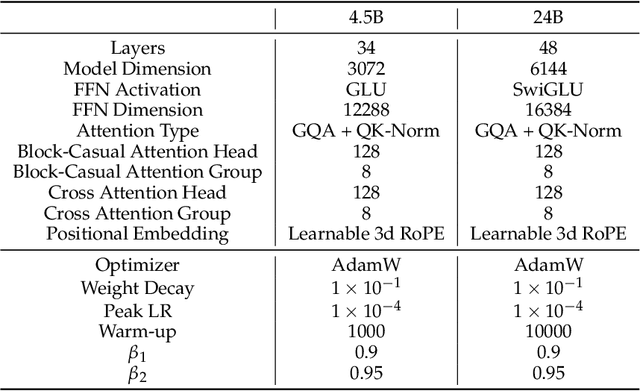
We present MAGI-1, a world model that generates videos by autoregressively predicting a sequence of video chunks, defined as fixed-length segments of consecutive frames. Trained to denoise per-chunk noise that increases monotonically over time, MAGI-1 enables causal temporal modeling and naturally supports streaming generation. It achieves strong performance on image-to-video (I2V) tasks conditioned on text instructions, providing high temporal consistency and scalability, which are made possible by several algorithmic innovations and a dedicated infrastructure stack. MAGI-1 facilitates controllable generation via chunk-wise prompting and supports real-time, memory-efficient deployment by maintaining constant peak inference cost, regardless of video length. The largest variant of MAGI-1 comprises 24 billion parameters and supports context lengths of up to 4 million tokens, demonstrating the scalability and robustness of our approach. The code and models are available at https://github.com/SandAI-org/MAGI-1 and https://github.com/SandAI-org/MagiAttention. The product can be accessed at https://sand.ai.