 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comprehensive Review on Noise Control of Diffusion Model
Feb 07, 2025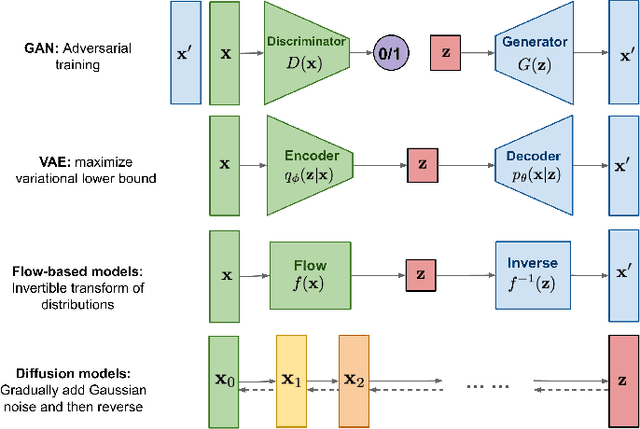
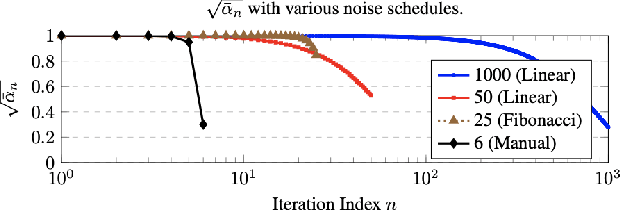
Diffusion models have recently emerged as powerful generative frameworks for producing high-quality images. A pivotal component of these models is the noise schedule, which governs the rate of noise injection during the diffusion process. Since the noise schedule substantially influences sampling quality and training quality, understanding its design and implications is crucial. In this discussion, various noise schedules are examined, and their distinguishing features and performance characteristics are highlighted.
WILD-SCAV: Benchmarking FPS Gaming AI on Unity3D-based Environments
Oct 14, 2022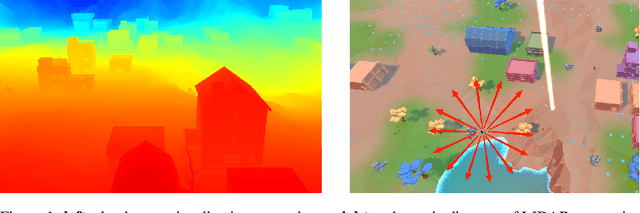
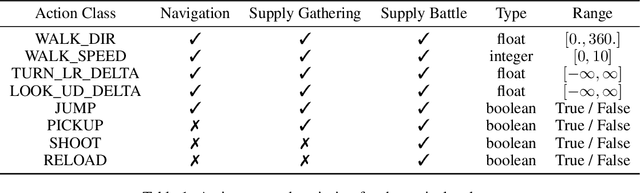

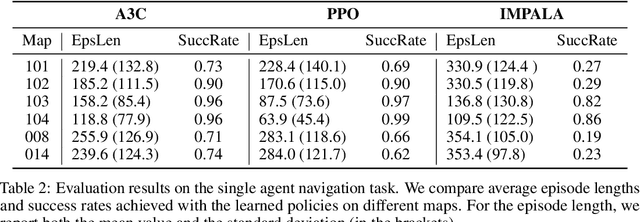
Recent advances in deep reinforcement learning (RL) have demonstrated complex decision-making capabilities in simulation environments such as Arcade Learning Environment, MuJoCo, and ViZDoom. However, they are hardly extensible to more complicated problems, mainly due to the lack of complexity and variations in the environments they are trained and tested on. Furthermore, they are not extensible to an open-world environment to facilitate long-term exploration research. To learn realistic task-solving capabilities, we need to develop an environment with greater diversity and complexity. We developed WILD-SCAV, a powerful and extensible environment based on a 3D open-world FPS (First-Person Shooter) game to bridge the gap. It provides realistic 3D environments of variable complexity, various tasks, and multiple modes of interaction, where agents can learn to perceive 3D environments, navigate and plan, compete and cooperate in a human-like manner. WILD-SCAV also supports different complexities, such as configurable maps with different terrains, building structures and distributions, and multi-agent settings with cooperative and competitive tasks. The experimental results on configurable complexity, multi-tasking, and multi-agent scenarios demonstrate the effectiveness of WILD-SCAV in benchmarking various RL algorithms, as well as it is potential to give rise to intelligent agents with generalized task-solving abilities. The link to our open-sourced code can be found here https://github.com/inspirai/wilderness-scavenger.