 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimple yet Effective: Low-Rank Spatial Attention for Neural Operators
Apr 04, 2026Neural operators have emerged as data-driven surrogates for solving partial differential equations (PDEs), and their success hinges on efficiently modeling the long-range, global coupling among spatial points induced by the underlying physics. In many PDE regimes, the induced global interaction kernels are empirically compressible, exhibiting rapid spectral decay that admits low-rank approximations. We leverage this observation to unify representative global mixing modules in neural operators under a shared low-rank template: compressing high-dimensional pointwise features into a compact latent space, processing global interactions within it, and reconstructing the global context back to spatial points. Guided by this view, we introduce Low-Rank Spatial Attention (LRSA) as a clean and direct instantiation of this template. Crucially, unlike prior approaches that often rely on non-standard aggregation or normalization modules, LRSA is built purely from standard Transformer primitives, i.e., attention, normalization, and feed-forward networks, yielding a concise block that is straightforward to implement and directly compatible with hardware-optimized kernels. In our experiments, such a simple construction is sufficient to achieve high accuracy, yielding an average error reduction of over 17\% relative to second-best methods, while remaining stable and efficient in mixed-precision training.
AMShortcut: An Inference- and Training-Efficient Inverse Design Model for Amorphous Materials
Mar 31, 2026Amorphous materials are solids that lack long-range atomic order but possess complex short- and medium-range order. Unlike crystalline materials that can be described by unit cells containing few up to hundreds of atoms, amorphous materials require larger simulation cells with at least hundreds or often thousands of atoms. Inverse design of amorphous materials with probabilistic generative models aims to generate the atomic positions and elements of amorphous materials given a set of desired properties. It has emerged as a promising approach for facilitating the application of amorphous materials in domains such as energy storage and thermal management. In this paper, we introduce AMShortcut, an inference- and training-efficient probabilistic generative model for amorphous materials. AMShortcut enables accurate inference of diverse short- and medium-range structures in amorphous materials with only a few sampling steps, mitigating the need for an excessive number of sampling steps that hinders inference efficiency. AMShortcut can be trained once with all relevant properties and perform inference conditioned on arbitrary combinations of desired properties, mitigating the need for training one model for each combination. Experiments on three amorphous materials datasets with diverse structures and properties demonstrate that AMShortcut achieves its design goals.
Learning Sparse Approximate Inverse Preconditioners for Conjugate Gradient Solvers on GPUs
Oct 31, 2025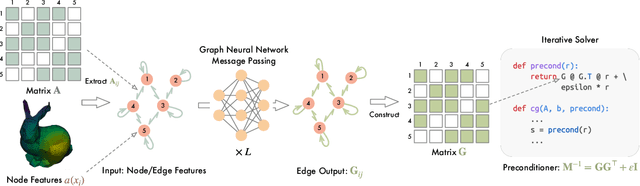

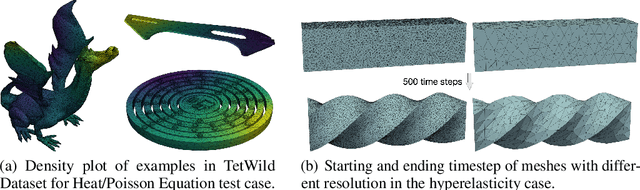
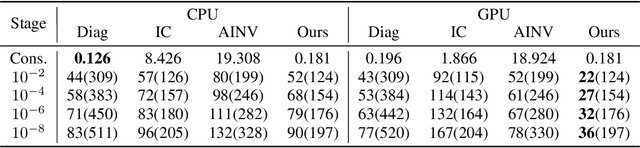
The conjugate gradient solver (CG) is a prevalent method for solving symmetric and positive definite linear systems Ax=b, where effective preconditioners are crucial for fast convergence. Traditional preconditioners rely on prescribed algorithms to offer rigorous theoretical guarantees, while limiting their ability to exploit optimization from data. Existing learning-based methods often utilize Graph Neural Networks (GNNs) to improve the performance and speed up the construction. However, their reliance on incomplete factorization leads to significant challenges: the associated triangular solve hinders GPU parallelization in practice, and introduces long-range dependencies which are difficult for GNNs to model. To address these issues, we propose a learning-based method to generate GPU-friendly preconditioners, particularly using GNNs to construct Sparse Approximate Inverse (SPAI) preconditioners, which avoids triangular solves and requires only two matrix-vector products at each CG step. The locality of matrix-vector product is compatible with the local propagation mechanism of GNNs. The flexibility of GNNs also allows our approach to be applied in a wide range of scenarios. Furthermore, we introduce a statistics-based scale-invariant loss function. Its design matches CG's property that the convergence rate depends on the condition number, rather than the absolute scale of A, leading to improved performance of the learned preconditioner. Evaluations on three PDE-derived datasets and one synthetic dataset demonstrate that our method outperforms standard preconditioners (Diagonal, IC, and traditional SPAI) and previous learning-based preconditioners on GPUs. We reduce solution time on GPUs by 40%-53% (68%-113% faster), along with better condition numbers and superior generalization performance. Source code available at https://github.com/Adversarr/LearningSparsePreconditioner4GPU
TopoGaussian: Inferring Internal Topology Structures from Visual Clues
Mar 16, 2025We present TopoGaussian, a holistic, particle-based pipeline for inferring the interior structure of an opaque object from easily accessible photos and videos as input. Traditional mesh-based approaches require tedious and error-prone mesh filling and fixing process, while typically output rough boundary surface. Our pipeline combines Gaussian Splatting with a novel, versatile particle-based differentiable simulator that simultaneously accommodates constitutive model, actuator, and collision, without interference with mesh. Based on the gradients from this simulator, we provide flexible choice of topology representation for optimization, including particle, neural implicit surface, and quadratic surface. The resultant pipeline takes easily accessible photos and videos as input and outputs the topology that matches the physical characteristics of the input. We demonstrate the efficacy of our pipeline on a synthetic dataset and four real-world tasks with 3D-printed prototypes. Compared with existing mesh-based method, our pipeline is 5.26x faster on average with improved shape quality. These results highlight the potential of our pipeline in 3D vision, soft robotics, and manufacturing applications.
ISAC Prototype System for Multi-Domain Cooperative Communication Networks
Oct 30, 2024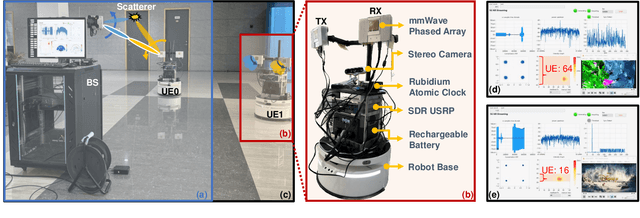
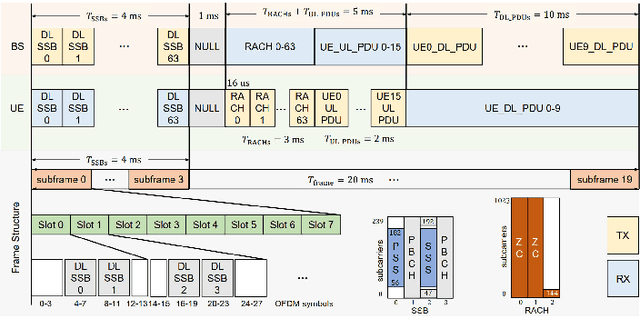
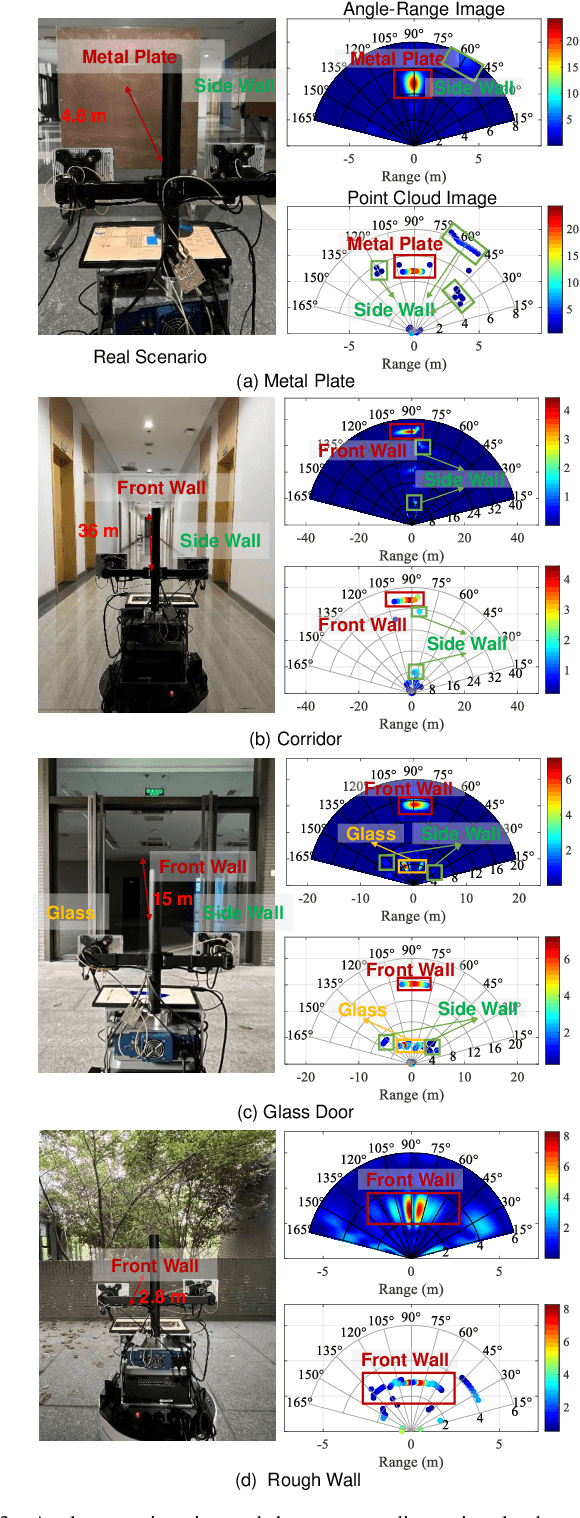
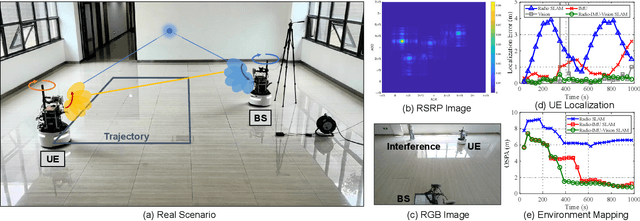
Future wireless networks are poised to transform into integrated sensing and communication (ISAC) networks, unlocking groundbreaking services such as digital twinning. To harness the full potential of ISAC networks, it is essential to experimentally validate their sensing capabilities and the role of sensing in boosting communication. However, current prototype systems fall short in supporting multiple sensing functions or validating sensing-assisted communication. In response, we have developed an advanced ISAC prototype system that incorporates monostatic, bistatic, and network sensing modes. This system supports multimodal data collection and synchronization, ensuring comprehensive experimental validation. On the communication front, it excels in sensing-aided beam tracking and real-time high-definition video transmission. For sensing applications, it provides precise angle and range measurements, real-time angle-range imaging, and radio-based simultaneous localization and mapping (SLAM). Our prototype aligns with the 5G New Radio standard, offering scalability for up to 16 user equipments (UEs) in uplink transmission and 10 UEs in downlink transmission. Real-world tests showcase the system's superior accuracy, with root mean square errors of 2.3 degrees for angle estimation and 0.3 meters (m) for range estimation. Additionally, the estimation errors for multimodal-aided real-time radio SLAM localization and mapping are 0.25 m and 0.8 m, respectively.
ScissorBot: Learning Generalizable Scissor Skill for Paper Cutting via Simulation, Imitation, and Sim2Real
Sep 21, 2024



This paper tackles the challenging robotic task of generalizable paper cutting using scissors. In this task, scissors attached to a robot arm are driven to accurately cut curves drawn on the paper, which is hung with the top edge fixed. Due to the frequent paper-scissor contact and consequent fracture, the paper features continual deformation and changing topology, which is diffult for accurate modeling. To ensure effective execution, we customize an action primitive sequence for imitation learning to constrain its action space, thus alleviating potential compounding errors. Finally, by integrating sim-to-real techniques to bridge the gap between simulation and reality, our policy can be effectively deployed on the real robot. Experimental results demonstrate that our method surpasses all baselines in both simulation and real-world benchmarks and achieves performance comparable to human operation with a single hand under the same conditions.
Neural Fluidic System Design and Control with Differentiable Simulation
May 22, 2024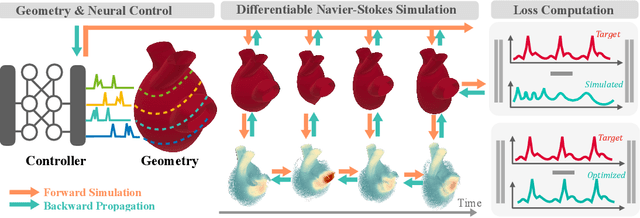
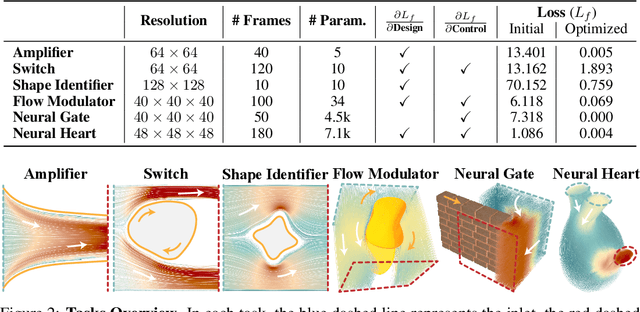
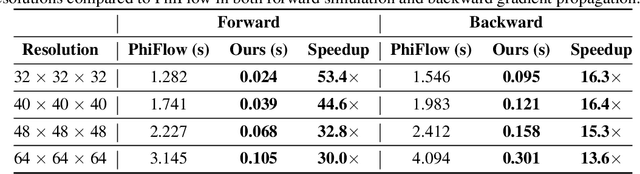
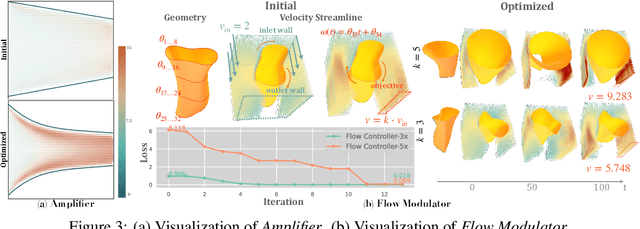
We present a novel framework to explore neural control and design of complex fluidic systems with dynamic solid boundaries. Our system features a fast differentiable Navier-Stokes solver with solid-fluid interface handling, a low-dimensional differentiable parametric geometry representation, a control-shape co-design algorithm, and gym-like simulation environments to facilitate various fluidic control design applications. Additionally, we present a benchmark of design, control, and learning tasks on high-fidelity, high-resolution dynamic fluid environments that pose challenges for existing differentiable fluid simulators. These tasks include designing the control of artificial hearts, identifying robotic end-effector shapes, and controlling a fluid gate. By seamlessly incorporating our differentiable fluid simulator into a learning framework, we demonstrate successful design, control, and learning results that surpass gradient-free solutions in these benchmark tasks.
QuasiSim: Parameterized Quasi-Physical Simulators for Dexterous Manipulations Transfer
Apr 11, 2024We explore the dexterous manipulation transfer problem by designing simulators. The task wishes to transfer human manipulations to dexterous robot hand simulations and is inherently difficult due to its intricate, highly-constrained, and discontinuous dynamics and the need to control a dexterous hand with a DoF to accurately replicate human manipulations. Previous approaches that optimize in high-fidelity black-box simulators or a modified one with relaxed constraints only demonstrate limited capabilities or are restricted by insufficient simulation fidelity. We introduce parameterized quasi-physical simulators and a physics curriculum to overcome these limitations. The key ideas are 1) balancing between fidelity and optimizability of the simulation via a curriculum of parameterized simulators, and 2) solving the problem in each of the simulators from the curriculum, with properties ranging from high task optimizability to high fidelity. We successfully enable a dexterous hand to track complex and diverse manipulations in high-fidelity simulated environments, boosting the success rate by 11\%+ from the best-performed baseline. The project website is available at https://meowuu7.github.io/QuasiSim/.
EGraFFBench: Evaluation of Equivariant Graph Neural Network Force Fields for Atomistic Simulations
Oct 03, 2023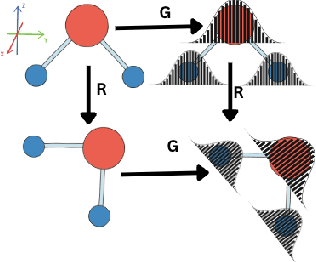
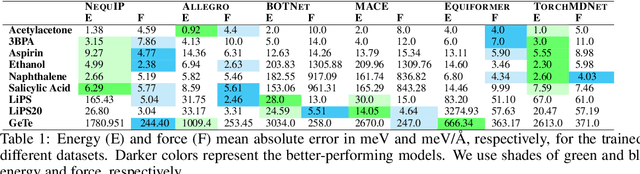
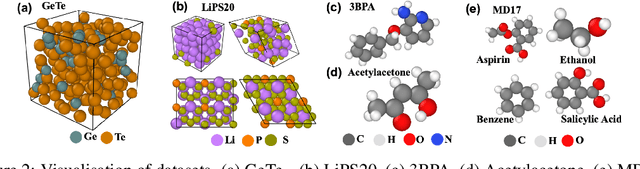
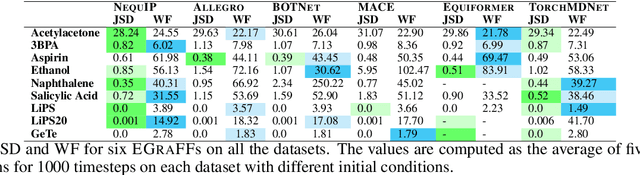
Equivariant graph neural networks force fields (EGraFFs) have shown great promise in modelling complex interactions in atomic systems by exploiting the graphs' inherent symmetries. Recent works have led to a surge in the development of novel architectures that incorporate equivariance-based inductive biases alongside architectural innovations like graph transformers and message passing to model atomic interactions. However, thorough evaluations of these deploying EGraFFs for the downstream task of real-world atomistic simulations, is lacking. To this end, here we perform a systematic benchmarking of 6 EGraFF algorithms (NequIP, Allegro, BOTNet, MACE, Equiformer, TorchMDNet), with the aim of understanding their capabilities and limitations for realistic atomistic simulations. In addition to our thorough evaluation and analysis on eight existing datasets based on the benchmarking literature, we release two new benchmark datasets, propose four new metrics, and three new challenging tasks. The new datasets and tasks evaluate the performance of EGraFF to out-of-distribution data, in terms of different crystal structures, temperatures, and new molecules. Interestingly, evaluation of the EGraFF models based on dynamic simulations reveals that having a lower error on energy or force does not guarantee stable or reliable simulation or faithful replication of the atomic structures. Moreover, we find that no model clearly outperforms other models on all datasets and tasks. Importantly, we show that the performance of all the models on out-of-distribution datasets is unreliable, pointing to the need for the development of a foundation model for force fields that can be used in real-world simulations. In summary, this work establishes a rigorous framework for evaluating machine learning force fields in the context of atomic simulations and points to open research challenges within this domain.
Learning Neural Constitutive Laws From Motion Observations for Generalizable PDE Dynamics
Apr 27, 2023



We propose a hybrid neural network (NN) and PDE approach for learning generalizable PDE dynamics from motion observations. Many NN approaches learn an end-to-end model that implicitly models both the governing PDE and constitutive models (or material models). Without explicit PDE knowledge, these approaches cannot guarantee physical correctness and have limited generalizability. We argue that the governing PDEs are often well-known and should be explicitly enforced rather than learned. Instead, constitutive models are particularly suitable for learning due to their data-fitting nature. To this end, we introduce a new framework termed "Neural Constitutive Laws" (NCLaw), which utilizes a network architecture that strictly guarantees standard constitutive priors, including rotation equivariance and undeformed state equilibrium. We embed this network inside a differentiable simulation and train the model by minimizing a loss function based on the difference between the simulation and the motion observation. We validate NCLaw on various large-deformation dynamical systems, ranging from solids to fluids. After training on a single motion trajectory, our method generalizes to new geometries, initial/boundary conditions, temporal ranges, and even multi-physics systems. On these extremely out-of-distribution generalization tasks, NCLaw is orders-of-magnitude more accurate than previous NN approaches. Real-world experiments demonstrate our method's ability to learn constitutive laws from videos.