 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Sparse Approximate Inverse Preconditioners for Conjugate Gradient Solvers on GPUs
Oct 31, 2025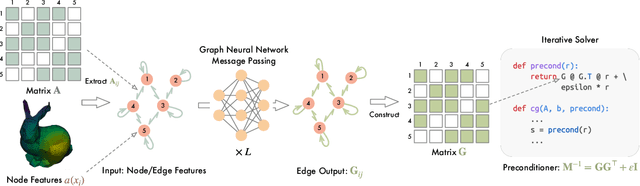

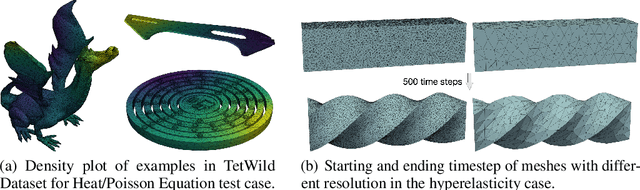
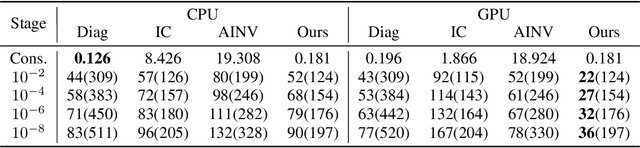
The conjugate gradient solver (CG) is a prevalent method for solving symmetric and positive definite linear systems Ax=b, where effective preconditioners are crucial for fast convergence. Traditional preconditioners rely on prescribed algorithms to offer rigorous theoretical guarantees, while limiting their ability to exploit optimization from data. Existing learning-based methods often utilize Graph Neural Networks (GNNs) to improve the performance and speed up the construction. However, their reliance on incomplete factorization leads to significant challenges: the associated triangular solve hinders GPU parallelization in practice, and introduces long-range dependencies which are difficult for GNNs to model. To address these issues, we propose a learning-based method to generate GPU-friendly preconditioners, particularly using GNNs to construct Sparse Approximate Inverse (SPAI) preconditioners, which avoids triangular solves and requires only two matrix-vector products at each CG step. The locality of matrix-vector product is compatible with the local propagation mechanism of GNNs. The flexibility of GNNs also allows our approach to be applied in a wide range of scenarios. Furthermore, we introduce a statistics-based scale-invariant loss function. Its design matches CG's property that the convergence rate depends on the condition number, rather than the absolute scale of A, leading to improved performance of the learned preconditioner. Evaluations on three PDE-derived datasets and one synthetic dataset demonstrate that our method outperforms standard preconditioners (Diagonal, IC, and traditional SPAI) and previous learning-based preconditioners on GPUs. We reduce solution time on GPUs by 40%-53% (68%-113% faster), along with better condition numbers and superior generalization performance. Source code available at https://github.com/Adversarr/LearningSparsePreconditioner4GPU
QuasiSim: Parameterized Quasi-Physical Simulators for Dexterous Manipulations Transfer
Apr 11, 2024We explore the dexterous manipulation transfer problem by designing simulators. The task wishes to transfer human manipulations to dexterous robot hand simulations and is inherently difficult due to its intricate, highly-constrained, and discontinuous dynamics and the need to control a dexterous hand with a DoF to accurately replicate human manipulations. Previous approaches that optimize in high-fidelity black-box simulators or a modified one with relaxed constraints only demonstrate limited capabilities or are restricted by insufficient simulation fidelity. We introduce parameterized quasi-physical simulators and a physics curriculum to overcome these limitations. The key ideas are 1) balancing between fidelity and optimizability of the simulation via a curriculum of parameterized simulators, and 2) solving the problem in each of the simulators from the curriculum, with properties ranging from high task optimizability to high fidelity. We successfully enable a dexterous hand to track complex and diverse manipulations in high-fidelity simulated environments, boosting the success rate by 11\%+ from the best-performed baseline. The project website is available at https://meowuu7.github.io/QuasiSim/.
HOI4D: A 4D Egocentric Dataset for Category-Level Human-Object Interaction
Apr 08, 2022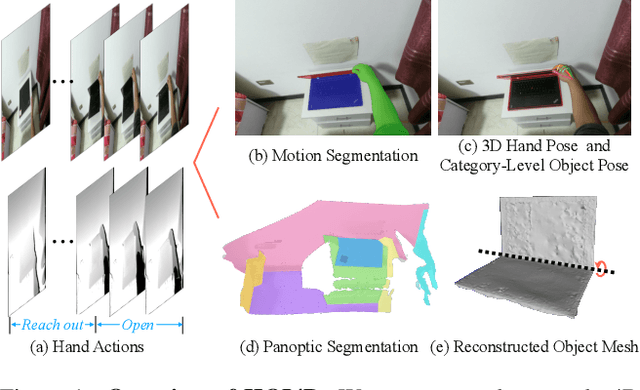

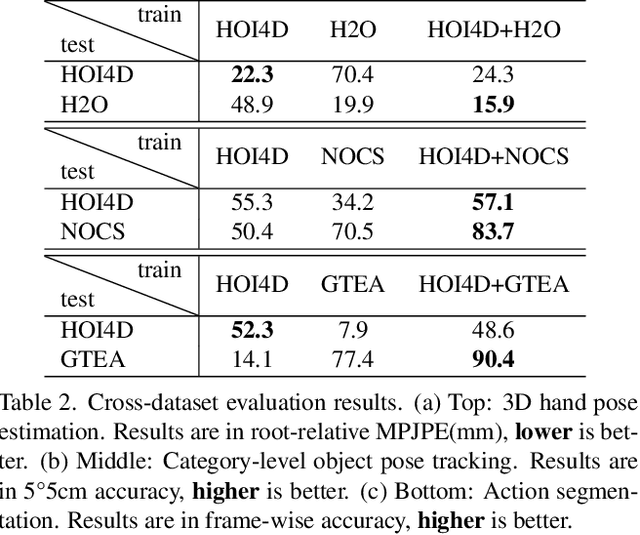
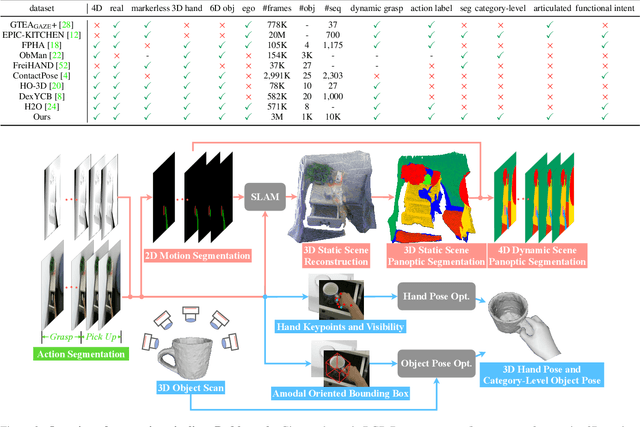
We present HOI4D, a large-scale 4D egocentric dataset with rich annotations, to catalyze the research of category-level human-object interaction. HOI4D consists of 2.4M RGB-D egocentric video frames over 4000 sequences collected by 4 participants interacting with 800 different object instances from 16 categories over 610 different indoor rooms. Frame-wise annotations for panoptic segmentation, motion segmentation, 3D hand pose, category-level object pose and hand action have also been provided, together with reconstructed object meshes and scene point clouds. With HOI4D, we establish three benchmarking tasks to promote category-level HOI from 4D visual signals including semantic segmentation of 4D dynamic point cloud sequences, category-level object pose tracking, and egocentric action segmentation with diverse interaction targets. In-depth analysis shows HOI4D poses great challenges to existing methods and produces great research opportunities.