 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRF-MatID: Dataset and Benchmark for Radio Frequency Material Identification
Jan 28, 2026Accurate material identification plays a crucial role in embodied AI systems, enabling a wide range of applications. However, current vision-based solutions are limited by the inherent constraints of optical sensors, while radio-frequency (RF) approaches, which can reveal intrinsic material properties, have received growing attention. Despite this progress, RF-based material identification remains hindered by the lack of large-scale public datasets and the limited benchmarking of learning-based approaches. In this work, we present RF-MatID, the first open-source, large-scale, wide-band, and geometry-diverse RF dataset for fine-grained material identification. RF-MatID includes 16 fine-grained categories grouped into 5 superclasses, spanning a broad frequency range from 4 to 43.5 GHz, and comprises 142k samples in both frequency- and time-domain representations. The dataset systematically incorporates controlled geometry perturbations, including variations in incidence angle and stand-off distance. We further establish a multi-setting, multi-protocol benchmark by evaluating state-of-the-art deep learning models, assessing both in-distribution performance and out-of-distribution robustness under cross-angle and cross-distance shifts. The 5 frequency-allocation protocols enable systematic frequency- and region-level analysis, thereby facilitating real-world deployment. RF-MatID aims to enable reproducible research, accelerate algorithmic advancement, foster cross-domain robustness, and support the development of real-world application in RF-based material identification.
Collision-Free Humanoid Traversal in Cluttered Indoor Scenes
Jan 23, 2026We study the problem of collision-free humanoid traversal in cluttered indoor scenes, such as hurdling over objects scattered on the floor, crouching under low-hanging obstacles, or squeezing through narrow passages. To achieve this goal, the humanoid needs to map its perception of surrounding obstacles with diverse spatial layouts and geometries to the corresponding traversal skills. However, the lack of an effective representation that captures humanoid-obstacle relationships during collision avoidance makes directly learning such mappings difficult. We therefore propose Humanoid Potential Field (HumanoidPF), which encodes these relationships as collision-free motion directions, significantly facilitating RL-based traversal skill learning. We also find that HumanoidPF exhibits a surprisingly negligible sim-to-real gap as a perceptual representation. To further enable generalizable traversal skills through diverse and challenging cluttered indoor scenes, we further propose a hybrid scene generation method, incorporating crops of realistic 3D indoor scenes and procedurally synthesized obstacles. We successfully transfer our policy to the real world and develop a teleoperation system where users could command the humanoid to traverse in cluttered indoor scenes with just a single click. Extensive experiments are conducted in both simulation and the real world to validate the effectiveness of our method. Demos and code can be found in our website: https://axian12138.github.io/CAT/.
Track Any Motions under Any Disturbances
Sep 17, 2025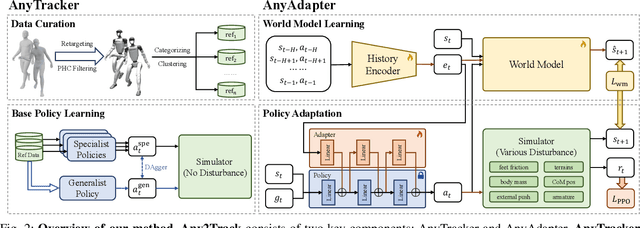

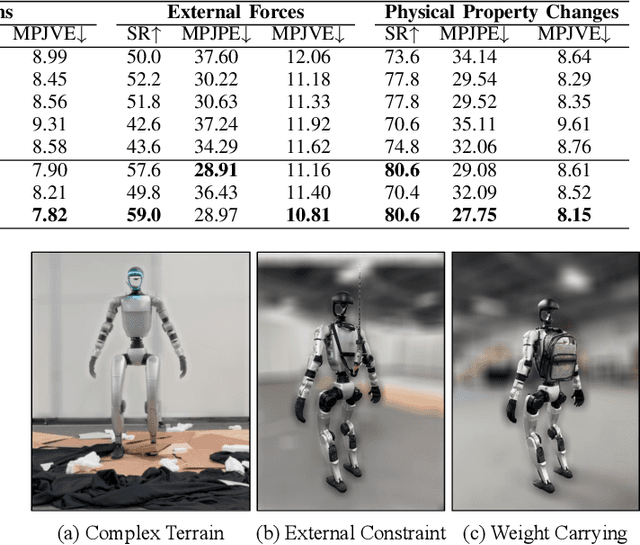

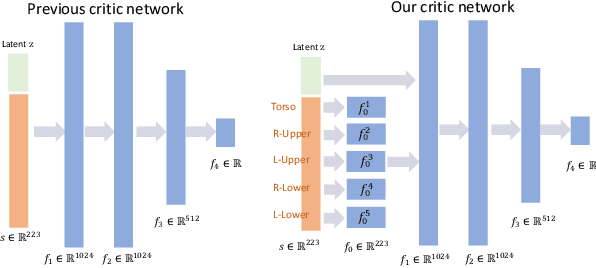
A foundational humanoid motion tracker is expected to be able to track diverse, highly dynamic, and contact-rich motions. More importantly, it needs to operate stably in real-world scenarios against various dynamics disturbances, including terrains, external forces, and physical property changes for general practical use. To achieve this goal, we propose Any2Track (Track Any motions under Any disturbances), a two-stage RL framework to track various motions under multiple disturbances in the real world. Any2Track reformulates dynamics adaptability as an additional capability on top of basic action execution and consists of two key components: AnyTracker and AnyAdapter. AnyTracker is a general motion tracker with a series of careful designs to track various motions within a single policy. AnyAdapter is a history-informed adaptation module that endows the tracker with online dynamics adaptability to overcome the sim2real gap and multiple real-world disturbances. We deploy Any2Track on Unitree G1 hardware and achieve a successful sim2real transfer in a zero-shot manner. Any2Track performs exceptionally well in tracking various motions under multiple real-world disturbances.
DexVLG: Dexterous Vision-Language-Grasp Model at Scale
Jul 03, 2025As large models gain traction, vision-language-action (VLA) systems are enabling robots to tackle increasingly complex tasks. However, limited by the difficulty of data collection, progress has mainly focused on controlling simple gripper end-effectors. There is little research on functional grasping with large models for human-like dexterous hands. In this paper, we introduce DexVLG, a large Vision-Language-Grasp model for Dexterous grasp pose prediction aligned with language instructions using single-view RGBD input. To accomplish this, we generate a dataset of 170 million dexterous grasp poses mapped to semantic parts across 174,000 objects in simulation, paired with detailed part-level captions. This large-scale dataset, named DexGraspNet 3.0, is used to train a VLM and flow-matching-based pose head capable of producing instruction-aligned grasp poses for tabletop objects. To assess DexVLG's performance, we create benchmarks in physics-based simulations and conduct real-world experiments. Extensive testing demonstrates DexVLG's strong zero-shot generalization capabilities-achieving over 76% zero-shot execution success rate and state-of-the-art part-grasp accuracy in simulation-and successful part-aligned grasps on physical objects in real-world scenarios.
Unleashing Humanoid Reaching Potential via Real-world-Ready Skill Space
May 16, 2025Humans possess a large reachable space in the 3D world, enabling interaction with objects at varying heights and distances. However, realizing such large-space reaching on humanoids is a complex whole-body control problem and requires the robot to master diverse skills simultaneously-including base positioning and reorientation, height and body posture adjustments, and end-effector pose control. Learning from scratch often leads to optimization difficulty and poor sim2real transferability. To address this challenge, we propose Real-world-Ready Skill Space (R2S2). Our approach begins with a carefully designed skill library consisting of real-world-ready primitive skills. We ensure optimal performance and robust sim2real transfer through individual skill tuning and sim2real evaluation. These skills are then ensembled into a unified latent space, serving as a structured prior that helps task execution in an efficient and sim2real transferable manner. A high-level planner, trained to sample skills from this space, enables the robot to accomplish real-world goal-reaching tasks. We demonstrate zero-shot sim2real transfer and validate R2S2 in multiple challenging goal-reaching scenarios.
FB-4D: Spatial-Temporal Coherent Dynamic 3D Content Generation with Feature Banks
Mar 26, 2025With the rapid advancements in diffusion models and 3D generation techniques, dynamic 3D content generation has become a crucial research area. However, achieving high-fidelity 4D (dynamic 3D) generation with strong spatial-temporal consistency remains a challenging task. Inspired by recent findings that pretrained diffusion features capture rich correspondences, we propose FB-4D, a novel 4D generation framework that integrates a Feature Bank mechanism to enhance both spatial and temporal consistency in generated frames. In FB-4D, we store features extracted from previous frames and fuse them into the process of generating subsequent frames, ensuring consistent characteristics across both time and multiple views. To ensure a compact representation, the Feature Bank is updated by a proposed dynamic merging mechanism. Leveraging this Feature Bank, we demonstrate for the first time that generating additional reference sequences through multiple autoregressive iterations can continuously improve generation performance. Experimental results show that FB-4D significantly outperforms existing methods in terms of rendering quality, spatial-temporal consistency, and robustness. It surpasses all multi-view generation tuning-free approaches by a large margin and achieves performance on par with training-based methods.
PartRM: Modeling Part-Level Dynamics with Large Cross-State Reconstruction Model
Mar 25, 2025As interest grows in world models that predict future states from current observations and actions, accurately modeling part-level dynamics has become increasingly relevant for various applications. Existing approaches, such as Puppet-Master, rely on fine-tuning large-scale pre-trained video diffusion models, which are impractical for real-world use due to the limitations of 2D video representation and slow processing times. To overcome these challenges, we present PartRM, a novel 4D reconstruction framework that simultaneously models appearance, geometry, and part-level motion from multi-view images of a static object. PartRM builds upon large 3D Gaussian reconstruction models, leveraging their extensive knowledge of appearance and geometry in static objects. To address data scarcity in 4D, we introduce the PartDrag-4D dataset, providing multi-view observations of part-level dynamics across over 20,000 states. We enhance the model's understanding of interaction conditions with a multi-scale drag embedding module that captures dynamics at varying granularities. To prevent catastrophic forgetting during fine-tuning, we implement a two-stage training process that focuses sequentially on motion and appearance learning. Experimental results show that PartRM establishes a new state-of-the-art in part-level motion learning and can be applied in manipulation tasks in robotics. Our code, data, and models are publicly available to facilitate future research.
VideoMAP: Toward Scalable Mamba-based Video Autoregressive Pretraining
Mar 16, 2025Recent Mamba-based architectures for video understanding demonstrate promising computational efficiency and competitive performance, yet struggle with overfitting issues that hinder their scalability. To overcome this challenge, we introduce VideoMAP, a Hybrid Mamba-Transformer framework featuring a novel pre-training approach. VideoMAP uses a 4:1 Mamba-to-Transformer ratio, effectively balancing computational cost and model capacity. This architecture, combined with our proposed frame-wise masked autoregressive pre-training strategy, delivers significant performance gains when scaling to larger models. Additionally, VideoMAP exhibits impressive sample efficiency, significantly outperforming existing methods with less training data. Experiments show that VideoMAP outperforms existing models across various datasets, including Kinetics-400, Something-Something V2, Breakfast, and COIN. Furthermore, we demonstrate the potential of VideoMAP as a visual encoder for multimodal large language models, highlighting its ability to reduce memory usage and enable the processing of longer video sequences. The code is open-source at https://github.com/yunzeliu/MAP
Learning Physics-Based Full-Body Human Reaching and Grasping from Brief Walking References
Mar 10, 2025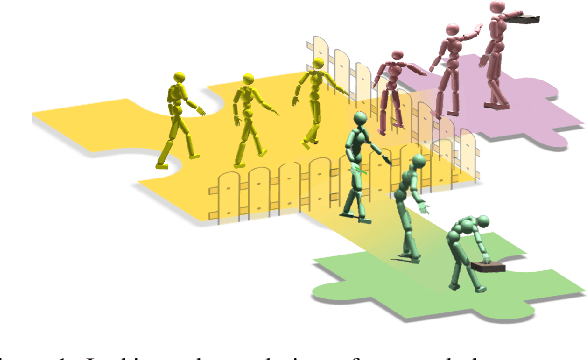

Existing motion generation methods based on mocap data are often limited by data quality and coverage. In this work, we propose a framework that generates diverse, physically feasible full-body human reaching and grasping motions using only brief walking mocap data. Base on the observation that walking data captures valuable movement patterns transferable across tasks and, on the other hand, the advanced kinematic methods can generate diverse grasping poses, which can then be interpolated into motions to serve as task-specific guidance. Our approach incorporates an active data generation strategy to maximize the utility of the generated motions, along with a local feature alignment mechanism that transfers natural movement patterns from walking data to enhance both the success rate and naturalness of the synthesized motions. By combining the fidelity and stability of natural walking with the flexibility and generalizability of task-specific generated data, our method demonstrates strong performance and robust adaptability in diverse scenes and with unseen objects.
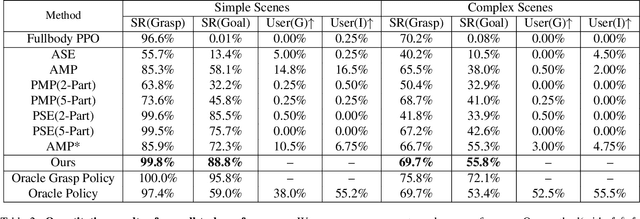
SoFar: Language-Grounded Orientation Bridges Spatial Reasoning and Object Manipulation
Feb 18, 2025


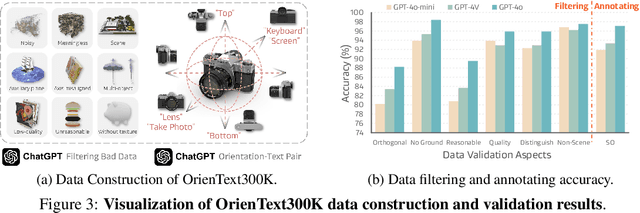
Spatial intelligence is a critical component of embodied AI, promoting robots to understand and interact with their environments. While recent advances have enhanced the ability of VLMs to perceive object locations and positional relationships, they still lack the capability to precisely understand object orientations-a key requirement for tasks involving fine-grained manipulations. Addressing this limitation not only requires geometric reasoning but also an expressive and intuitive way to represent orientation. In this context, we propose that natural language offers a more flexible representation space than canonical frames, making it particularly suitable for instruction-following robotic systems. In this paper, we introduce the concept of semantic orientation, which defines object orientations using natural language in a reference-frame-free manner (e.g., the ''plug-in'' direction of a USB or the ''handle'' direction of a knife). To support this, we construct OrienText300K, a large-scale dataset of 3D models annotated with semantic orientations that link geometric understanding to functional semantics. By integrating semantic orientation into a VLM system, we enable robots to generate manipulation actions with both positional and orientational constraints. Extensive experiments in simulation and real world demonstrate that our approach significantly enhances robotic manipulation capabilities, e.g., 48.7% accuracy on Open6DOR and 74.9% accuracy on SIMPLER.