 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParticle-Grid Neural Dynamics for Learning Deformable Object Models from RGB-D Videos
Jun 18, 2025Modeling the dynamics of deformable objects is challenging due to their diverse physical properties and the difficulty of estimating states from limited visual information. We address these challenges with a neural dynamics framework that combines object particles and spatial grids in a hybrid representation. Our particle-grid model captures global shape and motion information while predicting dense particle movements, enabling the modeling of objects with varied shapes and materials. Particles represent object shapes, while the spatial grid discretizes the 3D space to ensure spatial continuity and enhance learning efficiency. Coupled with Gaussian Splattings for visual rendering, our framework achieves a fully learning-based digital twin of deformable objects and generates 3D action-conditioned videos. Through experiments, we demonstrate that our model learns the dynamics of diverse objects -- such as ropes, cloths, stuffed animals, and paper bags -- from sparse-view RGB-D recordings of robot-object interactions, while also generalizing at the category level to unseen instances. Our approach outperforms state-of-the-art learning-based and physics-based simulators, particularly in scenarios with limited camera views. Furthermore, we showcase the utility of our learned models in model-based planning, enabling goal-conditioned object manipulation across a range of tasks. The project page is available at https://kywind.github.io/pgnd .
SoFar: Language-Grounded Orientation Bridges Spatial Reasoning and Object Manipulation
Feb 18, 2025


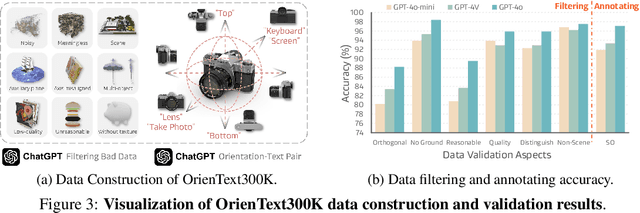
Spatial intelligence is a critical component of embodied AI, promoting robots to understand and interact with their environments. While recent advances have enhanced the ability of VLMs to perceive object locations and positional relationships, they still lack the capability to precisely understand object orientations-a key requirement for tasks involving fine-grained manipulations. Addressing this limitation not only requires geometric reasoning but also an expressive and intuitive way to represent orientation. In this context, we propose that natural language offers a more flexible representation space than canonical frames, making it particularly suitable for instruction-following robotic systems. In this paper, we introduce the concept of semantic orientation, which defines object orientations using natural language in a reference-frame-free manner (e.g., the ''plug-in'' direction of a USB or the ''handle'' direction of a knife). To support this, we construct OrienText300K, a large-scale dataset of 3D models annotated with semantic orientations that link geometric understanding to functional semantics. By integrating semantic orientation into a VLM system, we enable robots to generate manipulation actions with both positional and orientational constraints. Extensive experiments in simulation and real world demonstrate that our approach significantly enhances robotic manipulation capabilities, e.g., 48.7% accuracy on Open6DOR and 74.9% accuracy on SIMPLER.
AdaptiGraph: Material-Adaptive Graph-Based Neural Dynamics for Robotic Manipulation
Jul 10, 2024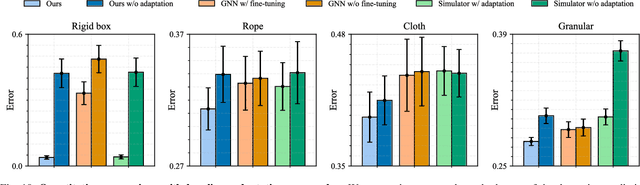
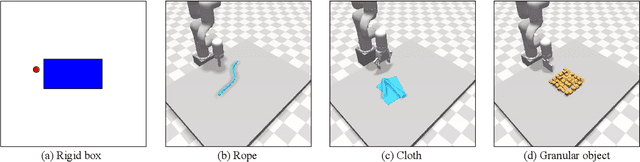
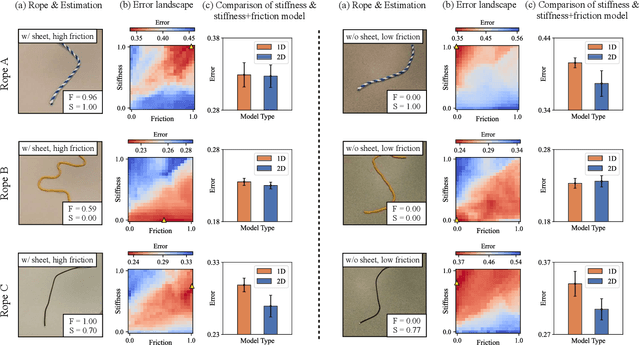
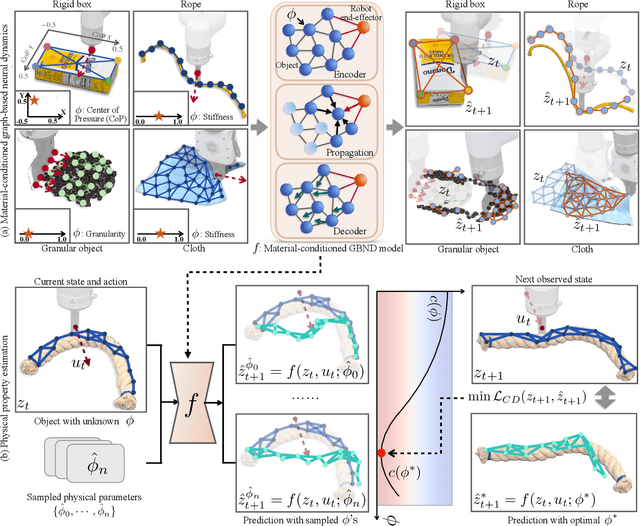
Predictive models are a crucial component of many robotic systems. Yet, constructing accurate predictive models for a variety of deformable objects, especially those with unknown physical properties, remains a significant challenge. This paper introduces AdaptiGraph, a learning-based dynamics modeling approach that enables robots to predict, adapt to, and control a wide array of challenging deformable materials with unknown physical properties. AdaptiGraph leverages the highly flexible graph-based neural dynamics (GBND) framework, which represents material bits as particles and employs a graph neural network (GNN) to predict particle motion. Its key innovation is a unified physical property-conditioned GBND model capable of predicting the motions of diverse materials with varying physical properties without retraining. Upon encountering new materials during online deployment, AdaptiGraph utilizes a physical property optimization process for a few-shot adaptation of the model, enhancing its fit to the observed interaction data. The adapted models can precisely simulate the dynamics and predict the motion of various deformable materials, such as ropes, granular media, rigid boxes, and cloth, while adapting to different physical properties, including stiffness, granular size, and center of pressure. On prediction and manipulation tasks involving a diverse set of real-world deformable objects, our method exhibits superior prediction accuracy and task proficiency over non-material-conditioned and non-adaptive models. The project page is available at https://robopil.github.io/adaptigraph/ .
Efficient Automatic Tuning for Data-driven Model Predictive Control via Meta-Learning
Mar 30, 2024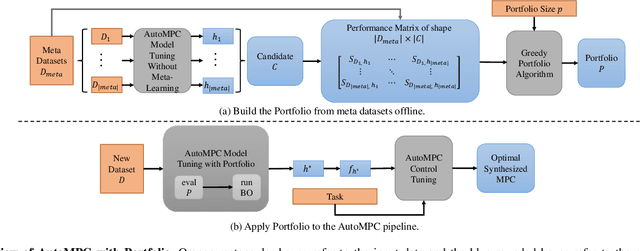
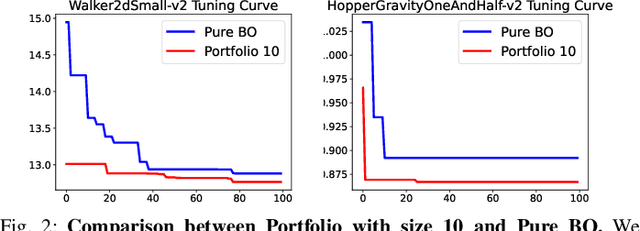
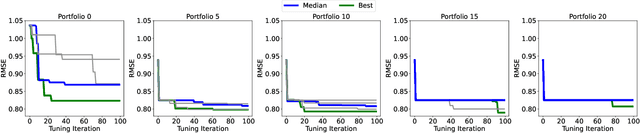
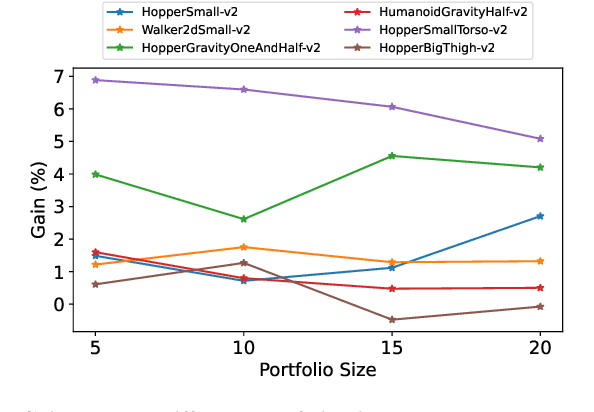
AutoMPC is a Python package that automates and optimizes data-driven model predictive control. However, it can be computationally expensive and unstable when exploring large search spaces using pure Bayesian Optimization (BO). To address these issues, this paper proposes to employ a meta-learning approach called Portfolio that improves AutoMPC's efficiency and stability by warmstarting BO. Portfolio optimizes initial designs for BO using a diverse set of configurations from previous tasks and stabilizes the tuning process by fixing initial configurations instead of selecting them randomly. Experimental results demonstrate that Portfolio outperforms the pure BO in finding desirable solutions for AutoMPC within limited computational resources on 11 nonlinear control simulation benchmarks and 1 physical underwater soft robot dataset.
Noisy Positive-Unlabeled Learning with Self-Training for Speculative Knowledge Graph Reasoning
Jun 13, 2023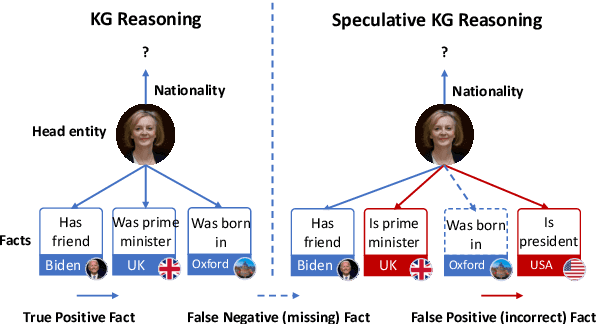
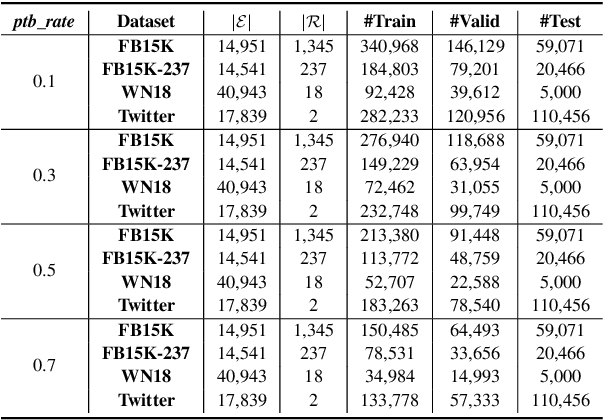
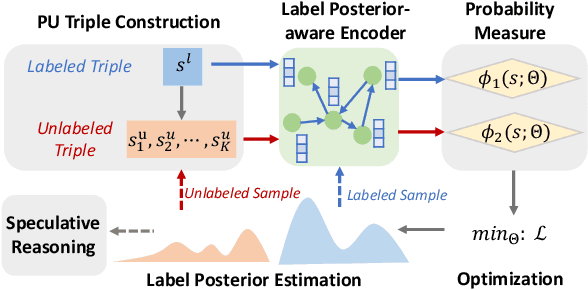
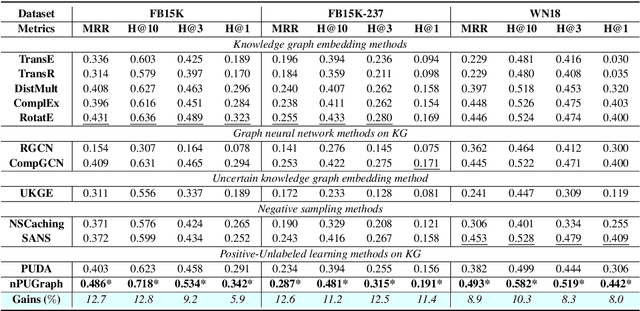
This paper studies speculative reasoning task on real-world knowledge graphs (KG) that contain both \textit{false negative issue} (i.e., potential true facts being excluded) and \textit{false positive issue} (i.e., unreliable or outdated facts being included). State-of-the-art methods fall short in the speculative reasoning ability, as they assume the correctness of a fact is solely determined by its presence in KG, making them vulnerable to false negative/positive issues. The new reasoning task is formulated as a noisy Positive-Unlabeled learning problem. We propose a variational framework, namely nPUGraph, that jointly estimates the correctness of both collected and uncollected facts (which we call \textit{label posterior}) and updates model parameters during training. The label posterior estimation facilitates speculative reasoning from two perspectives. First, it improves the robustness of a label posterior-aware graph encoder against false positive links. Second, it identifies missing facts to provide high-quality grounds of reasoning. They are unified in a simple yet effective self-training procedure. Empirically, extensive experiments on three benchmark KG and one Twitter dataset with various degrees of false negative/positive cases demonstrate the effectiveness of nPUGraph.