 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKPGrasp: Scalable Keypoint Flow Matching for Dexterous Grasp Generation
Jun 08, 2026Generating high-quality dexterous grasps remains challenging for learning-based methods, which often depend on carefully tuned contact losses or costly contact-based test-time refinement. We present KPGrasp, a flow-matching framework that learns dexterous grasp priors from large-scale data rather than relying on contact losses or contact-based test-time refinement. KPGrasp couples an all-Euclidean 3D hand-keypoint parameterization with a simple yet scalable Transformer flow model. The parameterization avoids the drawbacks of the conventional mixed SE(3) pose and joint-angle output space, expresses grasps in the same frame as the object point cloud, and thus enables native spatial reasoning; the Transformer flow model is trained with only the standard flow-matching loss and scales effectively with data, model capacity, and batch size. Experiments demonstrate state-of-the-art performance on two simulation benchmarks. On the Dexonomy benchmark, it reaches a 76.3% grasp success rate, improving over the strongest directly comparable baseline by 47.4% while reducing penetration depth to 2.4 mm. The same model also achieves the best average performance on the DexGrasp Anything benchmark without fine-tuning. For batched inference, KPGrasp requires only 0.032 s per grasp. Finally, real-world experiments on 20 diverse objects demonstrate that the pipeline can be deployed in a real-world setup.
Cosmos 3: Omnimodal World Models for Physical AI
Jun 01, 2026We introduce Cosmos 3, a family of omnimodal world models designed to jointly process and generate language, image, video, audio, and action sequences within a unified mixture-of-transformers architecture. By supporting highly flexible input-output configurations, Cosmos 3 seamlessly unifies critical modalities for Physical AI -- effectively subsuming vision-language models, video generators, world simulators, and world-action models into a single framework. Our evaluation demonstrates that Cosmos 3 establishes a new state-of-the-art across a diverse suite of understanding and generation tasks, demonstrating omnimodal world models as scalable, general-purpose backbones for embodied agents. Our post-trained Cosmos 3 models were ranked as the best open-source Text-to-Image and Image-to-Video models by Artificial Analysis, and the best policy model by RoboArena at the time the technical report was written. To accelerate open research and deployment in Physical AI, we make our code, model checkpoints, curated synthetic datasets, and evaluation benchmark available under the Linux Foundation's OpenMDW-1.1 https://openmdw.ai/license/1-1/ License at https://github.com/nvidia/cosmos}{github.com/nvidia/cosmos and https://huggingface.co/collections/nvidia/cosmos3 . The project website is available at https://research.nvidia.com/labs/cosmos-lab/cosmos3 .
BiDexGrasp: Coordinated Bimanual Dexterous Grasps across Object Geometries and Sizes
Apr 08, 2026Bimanual dexterous grasping is a fundamental and promising area in robotics, yet its progress is constrained by the lack of comprehensive datasets and powerful generation models. In this work, we propose BiDexGrasp, consists of a large-scale bimanual dexterous grasp dataset and a novel generation model. For dataset, we propose a novel bimanual grasp synthesis pipeline to efficiently annotate physically feasible data for dataset construction. This pipeline addresses the challenges of high-dimensional bimanual grasping through a two-stage synthesis strategy of efficient region-based grasp initialization and decoupled force-closure grasp optimization. Powered by this pipeline, we construct a large-scale bimanual dexterous grasp dataset, comprising 6351 diverse objects with sizes ranging from 30 to 80 cm, along with 9.7 million annotated grasp data. Based on this dataset, we further introduce a bimanual-coordinated and geometry-size-adaptive dexterous grasping generation framework. The framework lies in two key designs: a bimanual coordination module and a geometry-size-adaptive grasp generation strategy to generate coordinated and high-quality grasps on unseen objects. Extensive experiments conducted in both simulation and real world demonstrate the superior performance of our proposed data synthesis pipeline and learned generative framework.
Emerging Extrinsic Dexterity in Cluttered Scenes via Dynamics-aware Policy Learning
Mar 10, 2026Extrinsic dexterity leverages environmental contact to overcome the limitations of prehensile manipulation. However, achieving such dexterity in cluttered scenes remains challenging and underexplored, as it requires selectively exploiting contact among multiple interacting objects with inherently coupled dynamics. Existing approaches lack explicit modeling of such complex dynamics and therefore fall short in non-prehensile manipulation in cluttered environments, which in turn limits their practical applicability in real-world environments. In this paper, we introduce a Dynamics-Aware Policy Learning (DAPL) framework that can facilitate policy learning with a learned representation of contact-induced object dynamics in cluttered environments. This representation is learned through explicit world modeling and used to condition reinforcement learning, enabling extrinsic dexterity to emerge without hand-crafted contact heuristics or complex reward shaping. We evaluate our approach in both simulation and the real world. Our method outperforms prehensile manipulation, human teleoperation, and prior representation-based policies by over 25% in success rate on unseen simulated cluttered scenes with varying densities. The real-world success rate reaches around 50% across 10 cluttered scenes, while a practical grocery deployment further demonstrates robust sim-to-real transfer and applicability.
LDA-1B: Scaling Latent Dynamics Action Model via Universal Embodied Data Ingestion
Feb 12, 2026Recent robot foundation models largely rely on large-scale behavior cloning, which imitates expert actions but discards transferable dynamics knowledge embedded in heterogeneous embodied data. While the Unified World Model (UWM) formulation has the potential to leverage such diverse data, existing instantiations struggle to scale to foundation-level due to coarse data usage and fragmented datasets. We introduce LDA-1B, a robot foundation model that scales through universal embodied data ingestion by jointly learning dynamics, policy, and visual forecasting, assigning distinct roles to data of varying quality. To support this regime at scale, we assemble and standardize EI-30k, an embodied interaction dataset comprising over 30k hours of human and robot trajectories in a unified format. Scalable dynamics learning over such heterogeneous data is enabled by prediction in a structured DINO latent space, which avoids redundant pixel-space appearance modeling. Complementing this representation, LDA-1B employs a multi-modal diffusion transformer to handle asynchronous vision and action streams, enabling stable training at the 1B-parameter scale. Experiments in simulation and the real world show LDA-1B outperforms prior methods (e.g., $π_{0.5}$) by up to 21\%, 48\%, and 23\% on contact-rich, dexterous, and long-horizon tasks, respectively. Notably, LDA-1B enables data-efficient fine-tuning, gaining 10\% by leveraging 30\% low-quality trajectories typically harmful and discarded.
RoboVerse: Towards a Unified Platform, Dataset and Benchmark for Scalable and Generalizable Robot Learning
Apr 26, 2025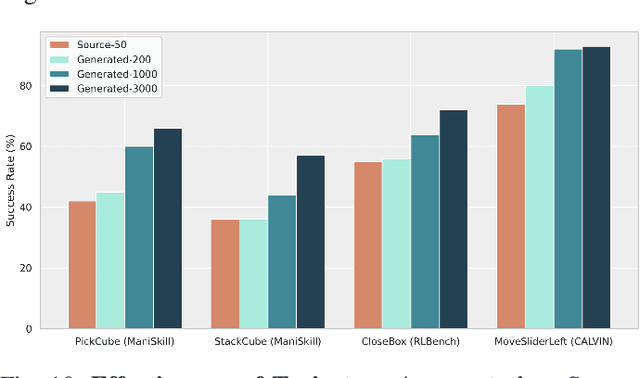
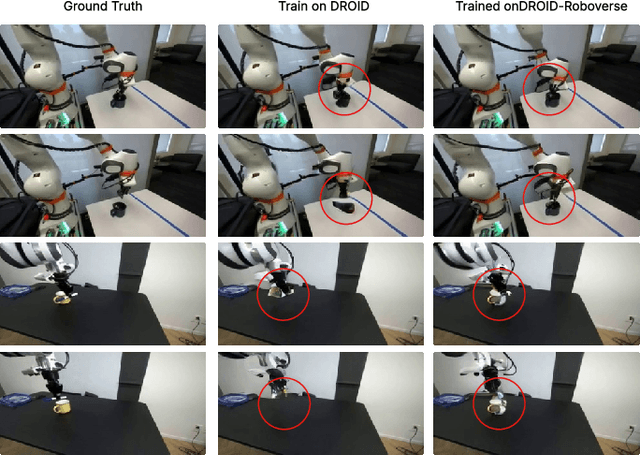
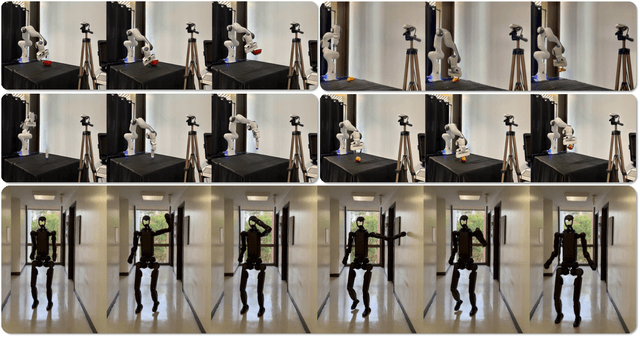
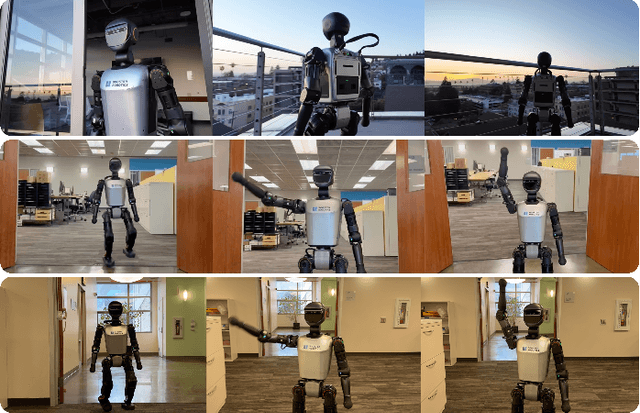
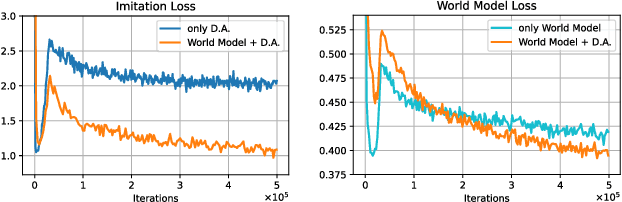
Data scaling and standardized evaluation benchmarks have driven significant advances in natural language processing and computer vision. However, robotics faces unique challenges in scaling data and establishing evaluation protocols. Collecting real-world data is resource-intensive and inefficient, while benchmarking in real-world scenarios remains highly complex. Synthetic data and simulation offer promising alternatives, yet existing efforts often fall short in data quality, diversity, and benchmark standardization. To address these challenges, we introduce RoboVerse, a comprehensive framework comprising a simulation platform, a synthetic dataset, and unified benchmarks. Our simulation platform supports multiple simulators and robotic embodiments, enabling seamless transitions between different environments. The synthetic dataset, featuring high-fidelity physics and photorealistic rendering, is constructed through multiple approaches. Additionally, we propose unified benchmarks for imitation learning and reinforcement learning, enabling evaluation across different levels of generalization. At the core of the simulation platform is MetaSim, an infrastructure that abstracts diverse simulation environments into a universal interface. It restructures existing simulation environments into a simulator-agnostic configuration system, as well as an API aligning different simulator functionalities, such as launching simulation environments, loading assets with initial states, stepping the physics engine, etc. This abstraction ensures interoperability and extensibility. Comprehensive experiments demonstrate that RoboVerse enhances the performance of imitation learning, reinforcement learning, world model learning, and sim-to-real transfer. These results validate the reliability of our dataset and benchmarks, establishing RoboVerse as a robust solution for advancing robot learning.
DyWA: Dynamics-adaptive World Action Model for Generalizable Non-prehensile Manipulation
Mar 21, 2025


Nonprehensile manipulation is crucial for handling objects that are too thin, large, or otherwise ungraspable in unstructured environments. While conventional planning-based approaches struggle with complex contact modeling, learning-based methods have recently emerged as a promising alternative. However, existing learning-based approaches face two major limitations: they heavily rely on multi-view cameras and precise pose tracking, and they fail to generalize across varying physical conditions, such as changes in object mass and table friction. To address these challenges, we propose the Dynamics-Adaptive World Action Model (DyWA), a novel framework that enhances action learning by jointly predicting future states while adapting to dynamics variations based on historical trajectories. By unifying the modeling of geometry, state, physics, and robot actions, DyWA enables more robust policy learning under partial observability. Compared to baselines, our method improves the success rate by 31.5% using only single-view point cloud observations in the simulation. Furthermore, DyWA achieves an average success rate of 68% in real-world experiments, demonstrating its ability to generalize across diverse object geometries, adapt to varying table friction, and robustness in challenging scenarios such as half-filled water bottles and slippery surfaces.
RoboHanger: Learning Generalizable Robotic Hanger Insertion for Diverse Garments
Dec 02, 2024



For the task of hanging clothes, learning how to insert a hanger into a garment is crucial but has been seldom explored in robotics. In this work, we address the problem of inserting a hanger into various unseen garments that are initially laid out flat on a table. This task is challenging due to its long-horizon nature, the high degrees of freedom of the garments, and the lack of data. To simplify the learning process, we first propose breaking the task into several stages. Then, we formulate each stage as a policy learning problem and propose low-dimensional action parameterization. To overcome the challenge of limited data, we build our own simulator and create 144 synthetic clothing assets to effectively collect high-quality training data. Our approach uses single-view depth images and object masks as input, which mitigates the Sim2Real appearance gap and achieves high generalization capabilities for new garments. Extensive experiments in both simulation and the real world validate our proposed method. By training on various garments in the simulator, our method achieves a 75\% success rate with 8 different unseen garments in the real world.
ScissorBot: Learning Generalizable Scissor Skill for Paper Cutting via Simulation, Imitation, and Sim2Real
Sep 21, 2024



This paper tackles the challenging robotic task of generalizable paper cutting using scissors. In this task, scissors attached to a robot arm are driven to accurately cut curves drawn on the paper, which is hung with the top edge fixed. Due to the frequent paper-scissor contact and consequent fracture, the paper features continual deformation and changing topology, which is diffult for accurate modeling. To ensure effective execution, we customize an action primitive sequence for imitation learning to constrain its action space, thus alleviating potential compounding errors. Finally, by integrating sim-to-real techniques to bridge the gap between simulation and reality, our policy can be effectively deployed on the real robot. Experimental results demonstrate that our method surpasses all baselines in both simulation and real-world benchmarks and achieves performance comparable to human operation with a single hand under the same conditions.
Towards Robust Probabilistic Modeling on SO(3) via Rotation Laplace Distribution
May 17, 2023



Estimating the 3DoF rotation from a single RGB image is an important yet challenging problem. As a popular approach, probabilistic rotation modeling additionally carries prediction uncertainty information, compared to single-prediction rotation regression. For modeling probabilistic distribution over SO(3), it is natural to use Gaussian-like Bingham distribution and matrix Fisher, however they are shown to be sensitive to outlier predictions, e.g. $180^\circ$ error and thus are unlikely to converge with optimal performance. In this paper, we draw inspiration from multivariate Laplace distribution and propose a novel rotation Laplace distribution on SO(3). Our rotation Laplace distribution is robust to the disturbance of outliers and enforces much gradient to the low-error region that it can improve. In addition, we show that our method also exhibits robustness to small noises and thus tolerates imperfect annotations. With this benefit, we demonstrate its advantages in semi-supervised rotation regression, where the pseudo labels are noisy. To further capture the multi-modal rotation solution space for symmetric objects, we extend our distribution to rotation Laplace mixture model and demonstrate its effectiveness. Our extensive experiments show that our proposed distribution and the mixture model achieve state-of-the-art performance in all the rotation regression experiments over both probabilistic and non-probabilistic baselines.