 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge Video Planner Enables Generalizable Robot Control
Dec 17, 2025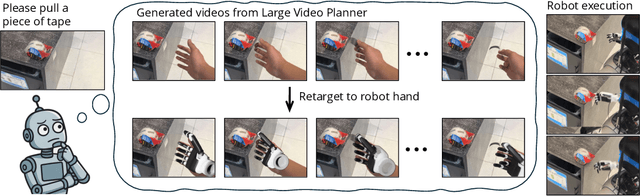
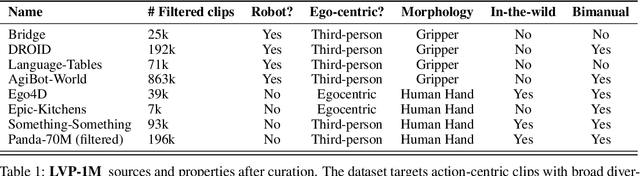
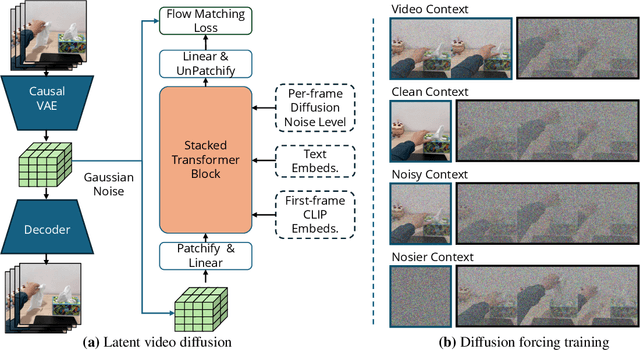

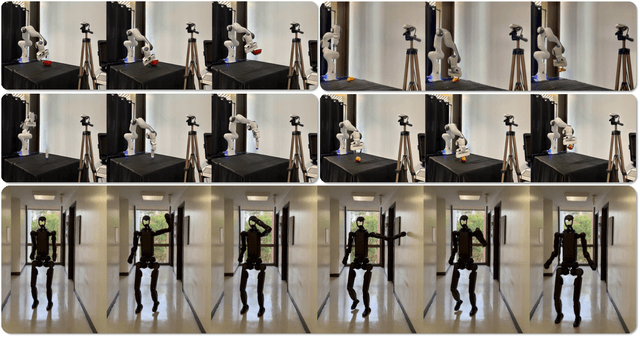
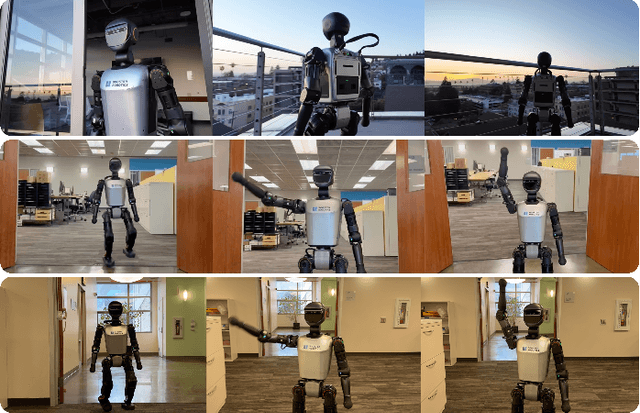
General-purpose robots require decision-making models that generalize across diverse tasks and environments. Recent works build robot foundation models by extending multimodal large language models (MLLMs) with action outputs, creating vision-language-action (VLA) systems. These efforts are motivated by the intuition that MLLMs' large-scale language and image pretraining can be effectively transferred to the action output modality. In this work, we explore an alternative paradigm of using large-scale video pretraining as a primary modality for building robot foundation models. Unlike static images and language, videos capture spatio-temporal sequences of states and actions in the physical world that are naturally aligned with robotic behavior. We curate an internet-scale video dataset of human activities and task demonstrations, and train, for the first time at a foundation-model scale, an open video model for generative robotics planning. The model produces zero-shot video plans for novel scenes and tasks, which we post-process to extract executable robot actions. We evaluate task-level generalization through third-party selected tasks in the wild and real-robot experiments, demonstrating successful physical execution. Together, these results show robust instruction following, strong generalization, and real-world feasibility. We release both the model and dataset to support open, reproducible video-based robot learning. Our website is available at https://www.boyuan.space/large-video-planner/.
MultiGen: Using Multimodal Generation in Simulation to Learn Multimodal Policies in Real
Jul 03, 2025Robots must integrate multiple sensory modalities to act effectively in the real world. Yet, learning such multimodal policies at scale remains challenging. Simulation offers a viable solution, but while vision has benefited from high-fidelity simulators, other modalities (e.g. sound) can be notoriously difficult to simulate. As a result, sim-to-real transfer has succeeded primarily in vision-based tasks, with multimodal transfer still largely unrealized. In this work, we tackle these challenges by introducing MultiGen, a framework that integrates large-scale generative models into traditional physics simulators, enabling multisensory simulation. We showcase our framework on the dynamic task of robot pouring, which inherently relies on multimodal feedback. By synthesizing realistic audio conditioned on simulation video, our method enables training on rich audiovisual trajectories -- without any real robot data. We demonstrate effective zero-shot transfer to real-world pouring with novel containers and liquids, highlighting the potential of generative modeling to both simulate hard-to-model modalities and close the multimodal sim-to-real gap.
SkillBlender: Towards Versatile Humanoid Whole-Body Loco-Manipulation via Skill Blending
Jun 11, 2025Humanoid robots hold significant potential in accomplishing daily tasks across diverse environments thanks to their flexibility and human-like morphology. Recent works have made significant progress in humanoid whole-body control and loco-manipulation leveraging optimal control or reinforcement learning. However, these methods require tedious task-specific tuning for each task to achieve satisfactory behaviors, limiting their versatility and scalability to diverse tasks in daily scenarios. To that end, we introduce SkillBlender, a novel hierarchical reinforcement learning framework for versatile humanoid loco-manipulation. SkillBlender first pretrains goal-conditioned task-agnostic primitive skills, and then dynamically blends these skills to accomplish complex loco-manipulation tasks with minimal task-specific reward engineering. We also introduce SkillBench, a parallel, cross-embodiment, and diverse simulated benchmark containing three embodiments, four primitive skills, and eight challenging loco-manipulation tasks, accompanied by a set of scientific evaluation metrics balancing accuracy and feasibility. Extensive simulated experiments show that our method significantly outperforms all baselines, while naturally regularizing behaviors to avoid reward hacking, resulting in more accurate and feasible movements for diverse loco-manipulation tasks in our daily scenarios. Our code and benchmark will be open-sourced to the community to facilitate future research. Project page: https://usc-gvl.github.io/SkillBlender-web/.
AlphaOne: Reasoning Models Thinking Slow and Fast at Test Time
May 30, 2025This paper presents AlphaOne ($\alpha$1), a universal framework for modulating reasoning progress in large reasoning models (LRMs) at test time. $\alpha$1 first introduces $\alpha$ moment, which represents the scaled thinking phase with a universal parameter $\alpha$. Within this scaled pre-$\alpha$ moment phase, it dynamically schedules slow thinking transitions by modeling the insertion of reasoning transition tokens as a Bernoulli stochastic process. After the $\alpha$ moment, $\alpha$1 deterministically terminates slow thinking with the end-of-thinking token, thereby fostering fast reasoning and efficient answer generation. This approach unifies and generalizes existing monotonic scaling methods by enabling flexible and dense slow-to-fast reasoning modulation. Extensive empirical studies on various challenging benchmarks across mathematical, coding, and scientific domains demonstrate $\alpha$1's superior reasoning capability and efficiency. Project page: https://alphaone-project.github.io/
FastTD3: Simple, Fast, and Capable Reinforcement Learning for Humanoid Control
May 29, 2025Reinforcement learning (RL) has driven significant progress in robotics, but its complexity and long training times remain major bottlenecks. In this report, we introduce FastTD3, a simple, fast, and capable RL algorithm that significantly speeds up training for humanoid robots in popular suites such as HumanoidBench, IsaacLab, and MuJoCo Playground. Our recipe is remarkably simple: we train an off-policy TD3 agent with several modifications -- parallel simulation, large-batch updates, a distributional critic, and carefully tuned hyperparameters. FastTD3 solves a range of HumanoidBench tasks in under 3 hours on a single A100 GPU, while remaining stable during training. We also provide a lightweight and easy-to-use implementation of FastTD3 to accelerate RL research in robotics.
DexGarmentLab: Dexterous Garment Manipulation Environment with Generalizable Policy
May 19, 2025Garment manipulation is a critical challenge due to the diversity in garment categories, geometries, and deformations. Despite this, humans can effortlessly handle garments, thanks to the dexterity of our hands. However, existing research in the field has struggled to replicate this level of dexterity, primarily hindered by the lack of realistic simulations of dexterous garment manipulation. Therefore, we propose DexGarmentLab, the first environment specifically designed for dexterous (especially bimanual) garment manipulation, which features large-scale high-quality 3D assets for 15 task scenarios, and refines simulation techniques tailored for garment modeling to reduce the sim-to-real gap. Previous data collection typically relies on teleoperation or training expert reinforcement learning (RL) policies, which are labor-intensive and inefficient. In this paper, we leverage garment structural correspondence to automatically generate a dataset with diverse trajectories using only a single expert demonstration, significantly reducing manual intervention. However, even extensive demonstrations cannot cover the infinite states of garments, which necessitates the exploration of new algorithms. To improve generalization across diverse garment shapes and deformations, we propose a Hierarchical gArment-manipuLation pOlicy (HALO). It first identifies transferable affordance points to accurately locate the manipulation area, then generates generalizable trajectories to complete the task. Through extensive experiments and detailed analysis of our method and baseline, we demonstrate that HALO consistently outperforms existing methods, successfully generalizing to previously unseen instances even with significant variations in shape and deformation where others fail. Our project page is available at: https://wayrise.github.io/DexGarmentLab/.
RoboVerse: Towards a Unified Platform, Dataset and Benchmark for Scalable and Generalizable Robot Learning
Apr 26, 2025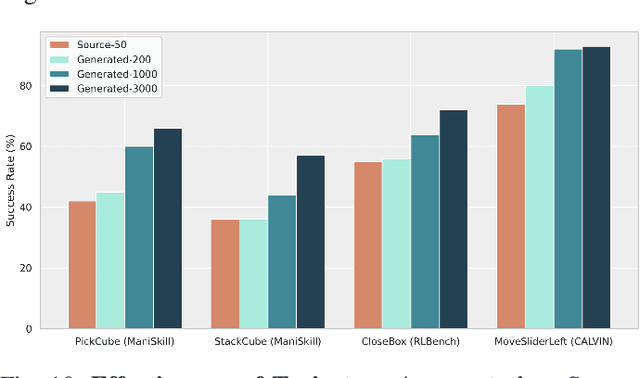
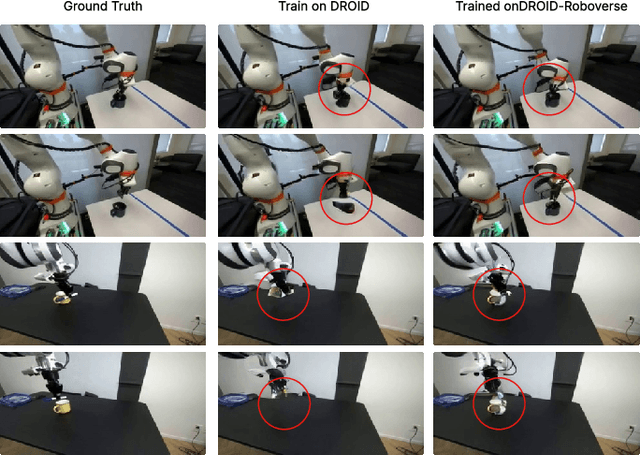
Data scaling and standardized evaluation benchmarks have driven significant advances in natural language processing and computer vision. However, robotics faces unique challenges in scaling data and establishing evaluation protocols. Collecting real-world data is resource-intensive and inefficient, while benchmarking in real-world scenarios remains highly complex. Synthetic data and simulation offer promising alternatives, yet existing efforts often fall short in data quality, diversity, and benchmark standardization. To address these challenges, we introduce RoboVerse, a comprehensive framework comprising a simulation platform, a synthetic dataset, and unified benchmarks. Our simulation platform supports multiple simulators and robotic embodiments, enabling seamless transitions between different environments. The synthetic dataset, featuring high-fidelity physics and photorealistic rendering, is constructed through multiple approaches. Additionally, we propose unified benchmarks for imitation learning and reinforcement learning, enabling evaluation across different levels of generalization. At the core of the simulation platform is MetaSim, an infrastructure that abstracts diverse simulation environments into a universal interface. It restructures existing simulation environments into a simulator-agnostic configuration system, as well as an API aligning different simulator functionalities, such as launching simulation environments, loading assets with initial states, stepping the physics engine, etc. This abstraction ensures interoperability and extensibility. Comprehensive experiments demonstrate that RoboVerse enhances the performance of imitation learning, reinforcement learning, world model learning, and sim-to-real transfer. These results validate the reliability of our dataset and benchmarks, establishing RoboVerse as a robust solution for advancing robot learning.
Learning from Massive Human Videos for Universal Humanoid Pose Control
Dec 18, 2024



Scalable learning of humanoid robots is crucial for their deployment in real-world applications. While traditional approaches primarily rely on reinforcement learning or teleoperation to achieve whole-body control, they are often limited by the diversity of simulated environments and the high costs of demonstration collection. In contrast, human videos are ubiquitous and present an untapped source of semantic and motion information that could significantly enhance the generalization capabilities of humanoid robots. This paper introduces Humanoid-X, a large-scale dataset of over 20 million humanoid robot poses with corresponding text-based motion descriptions, designed to leverage this abundant data. Humanoid-X is curated through a comprehensive pipeline: data mining from the Internet, video caption generation, motion retargeting of humans to humanoid robots, and policy learning for real-world deployment. With Humanoid-X, we further train a large humanoid model, UH-1, which takes text instructions as input and outputs corresponding actions to control a humanoid robot. Extensive simulated and real-world experiments validate that our scalable training approach leads to superior generalization in text-based humanoid control, marking a significant step toward adaptable, real-world-ready humanoid robots.
GAPartManip: A Large-scale Part-centric Dataset for Material-Agnostic Articulated Object Manipulation
Nov 27, 2024Effectively manipulating articulated objects in household scenarios is a crucial step toward achieving general embodied artificial intelligence. Mainstream research in 3D vision has primarily focused on manipulation through depth perception and pose detection. However, in real-world environments, these methods often face challenges due to imperfect depth perception, such as with transparent lids and reflective handles. Moreover, they generally lack the diversity in part-based interactions required for flexible and adaptable manipulation. To address these challenges, we introduced a large-scale part-centric dataset for articulated object manipulation that features both photo-realistic material randomizations and detailed annotations of part-oriented, scene-level actionable interaction poses. We evaluated the effectiveness of our dataset by integrating it with several state-of-the-art methods for depth estimation and interaction pose prediction. Additionally, we proposed a novel modular framework that delivers superior and robust performance for generalizable articulated object manipulation. Our extensive experiments demonstrate that our dataset significantly improves the performance of depth perception and actionable interaction pose prediction in both simulation and real-world scenarios.
DexGraspNet 2.0: Learning Generative Dexterous Grasping in Large-scale Synthetic Cluttered Scenes
Oct 30, 2024



Grasping in cluttered scenes remains highly challenging for dexterous hands due to the scarcity of data. To address this problem, we present a large-scale synthetic benchmark, encompassing 1319 objects, 8270 scenes, and 427 million grasps. Beyond benchmarking, we also propose a novel two-stage grasping method that learns efficiently from data by using a diffusion model that conditions on local geometry. Our proposed generative method outperforms all baselines in simulation experiments. Furthermore, with the aid of test-time-depth restoration, our method demonstrates zero-shot sim-to-real transfer, attaining 90.7% real-world dexterous grasping success rate in cluttered scenes.