 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Human-Humanoid Coordination for Collaborative Object Carrying
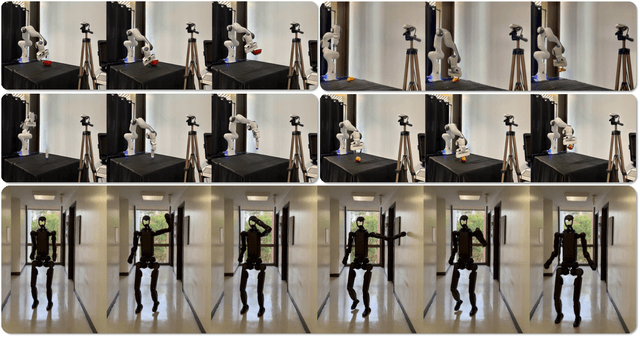
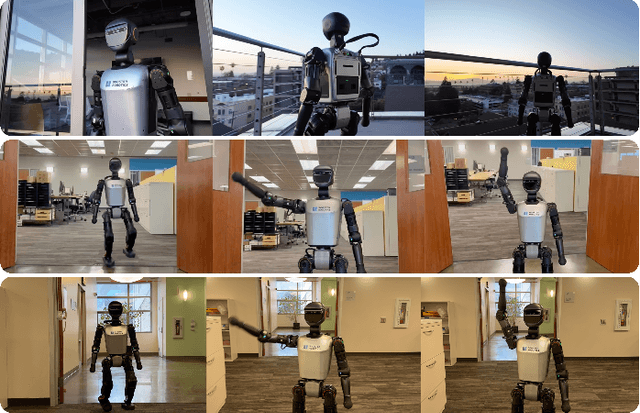
Oct 16, 2025Human-humanoid collaboration shows significant promise for applications in healthcare, domestic assistance, and manufacturing. While compliant robot-human collaboration has been extensively developed for robotic arms, enabling compliant human-humanoid collaboration remains largely unexplored due to humanoids' complex whole-body dynamics. In this paper, we propose a proprioception-only reinforcement learning approach, COLA, that combines leader and follower behaviors within a single policy. The model is trained in a closed-loop environment with dynamic object interactions to predict object motion patterns and human intentions implicitly, enabling compliant collaboration to maintain load balance through coordinated trajectory planning. We evaluate our approach through comprehensive simulator and real-world experiments on collaborative carrying tasks, demonstrating the effectiveness, generalization, and robustness of our model across various terrains and objects. Simulation experiments demonstrate that our model reduces human effort by 24.7%. compared to baseline approaches while maintaining object stability. Real-world experiments validate robust collaborative carrying across different object types (boxes, desks, stretchers, etc.) and movement patterns (straight-line, turning, slope climbing). Human user studies with 23 participants confirm an average improvement of 27.4% compared to baseline models. Our method enables compliant human-humanoid collaborative carrying without requiring external sensors or complex interaction models, offering a practical solution for real-world deployment.
GWM: Towards Scalable Gaussian World Models for Robotic Manipulation
Aug 25, 2025



Training robot policies within a learned world model is trending due to the inefficiency of real-world interactions. The established image-based world models and policies have shown prior success, but lack robust geometric information that requires consistent spatial and physical understanding of the three-dimensional world, even pre-trained on internet-scale video sources. To this end, we propose a novel branch of world model named Gaussian World Model (GWM) for robotic manipulation, which reconstructs the future state by inferring the propagation of Gaussian primitives under the effect of robot actions. At its core is a latent Diffusion Transformer (DiT) combined with a 3D variational autoencoder, enabling fine-grained scene-level future state reconstruction with Gaussian Splatting. GWM can not only enhance the visual representation for imitation learning agent by self-supervised future prediction training, but can serve as a neural simulator that supports model-based reinforcement learning. Both simulated and real-world experiments depict that GWM can precisely predict future scenes conditioned on diverse robot actions, and can be further utilized to train policies that outperform the state-of-the-art by impressive margins, showcasing the initial data scaling potential of 3D world model.
Spatial-Temporal Multi-Scale Quantization for Flexible Motion Generation
Aug 12, 2025Despite significant advancements in human motion generation, current motion representations, typically formulated as discrete frame sequences, still face two critical limitations: (i) they fail to capture motion from a multi-scale perspective, limiting the capability in complex patterns modeling; (ii) they lack compositional flexibility, which is crucial for model's generalization in diverse generation tasks. To address these challenges, we introduce MSQ, a novel quantization method that compresses the motion sequence into multi-scale discrete tokens across spatial and temporal dimensions. MSQ employs distinct encoders to capture body parts at varying spatial granularities and temporally interpolates the encoded features into multiple scales before quantizing them into discrete tokens. Building on this representation, we establish a generative mask modeling model to effectively support motion editing, motion control, and conditional motion generation. Through quantitative and qualitative analysis, we show that our quantization method enables the seamless composition of motion tokens without requiring specialized design or re-training. Furthermore, extensive evaluations demonstrate that our approach outperforms existing baseline methods on various benchmarks.
LEO-VL: Towards 3D Vision-Language Generalists via Data Scaling with Efficient Representation
Jun 11, 2025



Developing 3D-VL generalists capable of understanding 3D scenes and following natural language instructions to perform a wide range of tasks has been a long-standing goal in the 3D-VL community. Despite recent progress, 3D-VL models still lag behind their 2D counterparts in capability and robustness, falling short of the generalist standard. A key obstacle to developing 3D-VL generalists lies in data scalability, hindered by the lack of an efficient scene representation. We propose LEO-VL, a 3D-VL model built upon condensed feature grid (CFG), an efficient scene representation that bridges 2D perception and 3D spatial structure while significantly reducing token overhead. This efficiency unlocks large-scale training towards 3D-VL generalist, for which we curate over 700k high-quality 3D-VL data spanning four domains of real-world indoor scenes and five tasks such as captioning and dialogue. LEO-VL achieves state-of-the-art performance on a variety of 3D QA benchmarks, including SQA3D, MSQA, and Beacon3D. Ablation studies confirm the efficiency of our representation, the importance of task and scene diversity, and the validity of our data curation principle. Furthermore, we introduce SceneDPO, a novel post-training objective that enhances the robustness of 3D-VL models. We hope our findings contribute to the advancement of scalable and robust 3D-VL generalists.
Learning Unified Force and Position Control for Legged Loco-Manipulation
May 27, 2025Robotic loco-manipulation tasks often involve contact-rich interactions with the environment, requiring the joint modeling of contact force and robot position. However, recent visuomotor policies often focus solely on learning position or force control, overlooking their co-learning. In this work, we propose the first unified policy for legged robots that jointly models force and position control learned without reliance on force sensors. By simulating diverse combinations of position and force commands alongside external disturbance forces, we use reinforcement learning to learn a policy that estimates forces from historical robot states and compensates for them through position and velocity adjustments. This policy enables a wide range of manipulation behaviors under varying force and position inputs, including position tracking, force application, force tracking, and compliant interactions. Furthermore, we demonstrate that the learned policy enhances trajectory-based imitation learning pipelines by incorporating essential contact information through its force estimation module, achieving approximately 39.5% higher success rates across four challenging contact-rich manipulation tasks compared to position-control policies. Extensive experiments on both a quadrupedal manipulator and a humanoid robot validate the versatility and robustness of the proposed policy across diverse scenarios.
MetaScenes: Towards Automated Replica Creation for Real-world 3D Scans
May 05, 2025Embodied AI (EAI) research requires high-quality, diverse 3D scenes to effectively support skill acquisition, sim-to-real transfer, and generalization. Achieving these quality standards, however, necessitates the precise replication of real-world object diversity. Existing datasets demonstrate that this process heavily relies on artist-driven designs, which demand substantial human effort and present significant scalability challenges. To scalably produce realistic and interactive 3D scenes, we first present MetaScenes, a large-scale, simulatable 3D scene dataset constructed from real-world scans, which includes 15366 objects spanning 831 fine-grained categories. Then, we introduce Scan2Sim, a robust multi-modal alignment model, which enables the automated, high-quality replacement of assets, thereby eliminating the reliance on artist-driven designs for scaling 3D scenes. We further propose two benchmarks to evaluate MetaScenes: a detailed scene synthesis task focused on small item layouts for robotic manipulation and a domain transfer task in vision-and-language navigation (VLN) to validate cross-domain transfer. Results confirm MetaScene's potential to enhance EAI by supporting more generalizable agent learning and sim-to-real applications, introducing new possibilities for EAI research. Project website: https://meta-scenes.github.io/.
Masked Point-Entity Contrast for Open-Vocabulary 3D Scene Understanding
Apr 28, 2025Open-vocabulary 3D scene understanding is pivotal for enhancing physical intelligence, as it enables embodied agents to interpret and interact dynamically within real-world environments. This paper introduces MPEC, a novel Masked Point-Entity Contrastive learning method for open-vocabulary 3D semantic segmentation that leverages both 3D entity-language alignment and point-entity consistency across different point cloud views to foster entity-specific feature representations. Our method improves semantic discrimination and enhances the differentiation of unique instances, achieving state-of-the-art results on ScanNet for open-vocabulary 3D semantic segmentation and demonstrating superior zero-shot scene understanding capabilities. Extensive fine-tuning experiments on 8 datasets, spanning from low-level perception to high-level reasoning tasks, showcase the potential of learned 3D features, driving consistent performance gains across varied 3D scene understanding tasks. Project website: https://mpec-3d.github.io/
RoboVerse: Towards a Unified Platform, Dataset and Benchmark for Scalable and Generalizable Robot Learning
Apr 26, 2025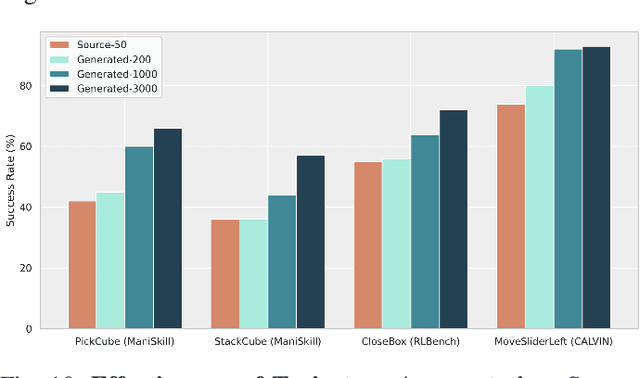
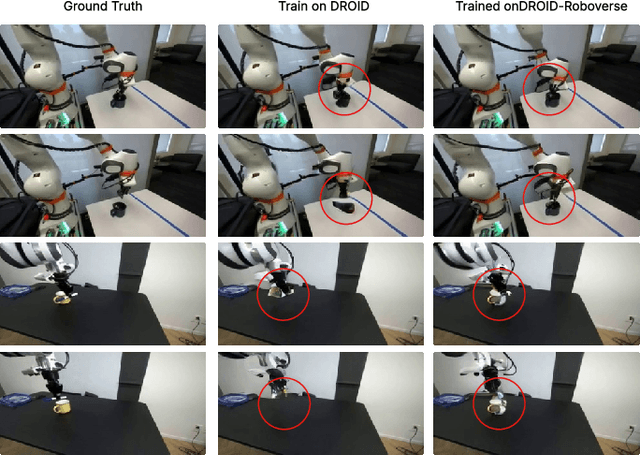
Data scaling and standardized evaluation benchmarks have driven significant advances in natural language processing and computer vision. However, robotics faces unique challenges in scaling data and establishing evaluation protocols. Collecting real-world data is resource-intensive and inefficient, while benchmarking in real-world scenarios remains highly complex. Synthetic data and simulation offer promising alternatives, yet existing efforts often fall short in data quality, diversity, and benchmark standardization. To address these challenges, we introduce RoboVerse, a comprehensive framework comprising a simulation platform, a synthetic dataset, and unified benchmarks. Our simulation platform supports multiple simulators and robotic embodiments, enabling seamless transitions between different environments. The synthetic dataset, featuring high-fidelity physics and photorealistic rendering, is constructed through multiple approaches. Additionally, we propose unified benchmarks for imitation learning and reinforcement learning, enabling evaluation across different levels of generalization. At the core of the simulation platform is MetaSim, an infrastructure that abstracts diverse simulation environments into a universal interface. It restructures existing simulation environments into a simulator-agnostic configuration system, as well as an API aligning different simulator functionalities, such as launching simulation environments, loading assets with initial states, stepping the physics engine, etc. This abstraction ensures interoperability and extensibility. Comprehensive experiments demonstrate that RoboVerse enhances the performance of imitation learning, reinforcement learning, world model learning, and sim-to-real transfer. These results validate the reliability of our dataset and benchmarks, establishing RoboVerse as a robust solution for advancing robot learning.
Unveiling the Mist over 3D Vision-Language Understanding: Object-centric Evaluation with Chain-of-Analysis
Apr 01, 2025Existing 3D vision-language (3D-VL) benchmarks fall short in evaluating 3D-VL models, creating a "mist" that obscures rigorous insights into model capabilities and 3D-VL tasks. This mist persists due to three key limitations. First, flawed test data, like ambiguous referential text in the grounding task, can yield incorrect and unreliable test results. Second, oversimplified metrics such as simply averaging accuracy per question answering (QA) pair, cannot reveal true model capability due to their vulnerability to language variations. Third, existing benchmarks isolate the grounding and QA tasks, disregarding the underlying coherence that QA should be based on solid grounding capabilities. To unveil the "mist", we propose Beacon3D, a benchmark for 3D-VL grounding and QA tasks, delivering a perspective shift in the evaluation of 3D-VL understanding. Beacon3D features (i) high-quality test data with precise and natural language, (ii) object-centric evaluation with multiple tests per object to ensure robustness, and (iii) a novel chain-of-analysis paradigm to address language robustness and model performance coherence across grounding and QA. Our evaluation of state-of-the-art 3D-VL models on Beacon3D reveals that (i) object-centric evaluation elicits true model performance and particularly weak generalization in QA; (ii) grounding-QA coherence remains fragile in current 3D-VL models, and (iii) incorporating large language models (LLMs) to 3D-VL models, though as a prevalent practice, hinders grounding capabilities and has yet to elevate QA capabilities. We hope Beacon3D and our comprehensive analysis could benefit the 3D-VL community towards faithful developments.
Building Interactable Replicas of Complex Articulated Objects via Gaussian Splatting
Feb 26, 2025Building articulated objects is a key challenge in computer vision. Existing methods often fail to effectively integrate information across different object states, limiting the accuracy of part-mesh reconstruction and part dynamics modeling, particularly for complex multi-part articulated objects. We introduce ArtGS, a novel approach that leverages 3D Gaussians as a flexible and efficient representation to address these issues. Our method incorporates canonical Gaussians with coarse-to-fine initialization and updates for aligning articulated part information across different object states, and employs a skinning-inspired part dynamics modeling module to improve both part-mesh reconstruction and articulation learning. Extensive experiments on both synthetic and real-world datasets, including a new benchmark for complex multi-part objects, demonstrate that ArtGS achieves state-of-the-art performance in joint parameter estimation and part mesh reconstruction. Our approach significantly improves reconstruction quality and efficiency, especially for multi-part articulated objects. Additionally, we provide comprehensive analyses of our design choices, validating the effectiveness of each component to highlight potential areas for future improvement.