 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCorrectNav: Self-Correction Flywheel Empowers Vision-Language-Action Navigation Model
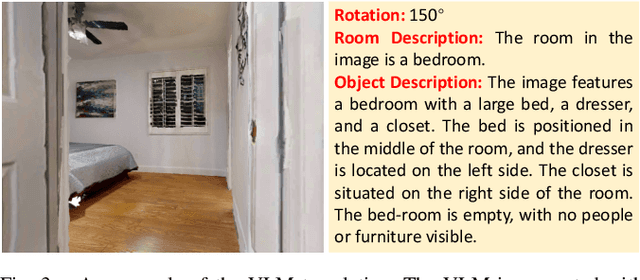
Aug 14, 2025Existing vision-and-language navigation models often deviate from the correct trajectory when executing instructions. However, these models lack effective error correction capability, hindering their recovery from errors. To address this challenge, we propose Self-correction Flywheel, a novel post-training paradigm. Instead of considering the model's error trajectories on the training set as a drawback, our paradigm emphasizes their significance as a valuable data source. We have developed a method to identify deviations in these error trajectories and devised innovative techniques to automatically generate self-correction data for perception and action. These self-correction data serve as fuel to power the model's continued training. The brilliance of our paradigm is revealed when we re-evaluate the model on the training set, uncovering new error trajectories. At this time, the self-correction flywheel begins to spin. Through multiple flywheel iterations, we progressively enhance our monocular RGB-based VLA navigation model CorrectNav. Experiments on R2R-CE and RxR-CE benchmarks show CorrectNav achieves new state-of-the-art success rates of 65.1% and 69.3%, surpassing prior best VLA navigation models by 8.2% and 16.4%. Real robot tests in various indoor and outdoor environments demonstrate \method's superior capability of error correction, dynamic obstacle avoidance, and long instruction following.
CheckManual: A New Challenge and Benchmark for Manual-based Appliance Manipulation
Jun 11, 2025Correct use of electrical appliances has significantly improved human life quality. Unlike simple tools that can be manipulated with common sense, different parts of electrical appliances have specific functions defined by manufacturers. If we want the robot to heat bread by microwave, we should enable them to review the microwave manual first. From the manual, it can learn about component functions, interaction methods, and representative task steps about appliances. However, previous manual-related works remain limited to question-answering tasks while existing manipulation researchers ignore the manual's important role and fail to comprehend multi-page manuals. In this paper, we propose the first manual-based appliance manipulation benchmark CheckManual. Specifically, we design a large model-assisted human-revised data generation pipeline to create manuals based on CAD appliance models. With these manuals, we establish novel manual-based manipulation challenges, metrics, and simulator environments for model performance evaluation. Furthermore, we propose the first manual-based manipulation planning model ManualPlan to set up a group of baselines for the CheckManual benchmark.
InstructNav: Zero-shot System for Generic Instruction Navigation in Unexplored Environment
Jun 07, 2024



Enabling robots to navigate following diverse language instructions in unexplored environments is an attractive goal for human-robot interaction. However, this goal is challenging because different navigation tasks require different strategies. The scarcity of instruction navigation data hinders training an instruction navigation model with varied strategies. Therefore, previous methods are all constrained to one specific type of navigation instruction. In this work, we propose InstructNav, a generic instruction navigation system. InstructNav makes the first endeavor to handle various instruction navigation tasks without any navigation training or pre-built maps. To reach this goal, we introduce Dynamic Chain-of-Navigation (DCoN) to unify the planning process for different types of navigation instructions. Furthermore, we propose Multi-sourced Value Maps to model key elements in instruction navigation so that linguistic DCoN planning can be converted into robot actionable trajectories. With InstructNav, we complete the R2R-CE task in a zero-shot way for the first time and outperform many task-training methods. Besides, InstructNav also surpasses the previous SOTA method by 10.48% on the zero-shot Habitat ObjNav and by 86.34% on demand-driven navigation DDN. Real robot experiments on diverse indoor scenes further demonstrate our method's robustness in coping with the environment and instruction variations.
ManipLLM: Embodied Multimodal Large Language Model for Object-Centric Robotic Manipulation
Dec 24, 2023



Robot manipulation relies on accurately predicting contact points and end-effector directions to ensure successful operation. However, learning-based robot manipulation, trained on a limited category within a simulator, often struggles to achieve generalizability, especially when confronted with extensive categories. Therefore, we introduce an innovative approach for robot manipulation that leverages the robust reasoning capabilities of Multimodal Large Language Models (MLLMs) to enhance the stability and generalization of manipulation. By fine-tuning the injected adapters, we preserve the inherent common sense and reasoning ability of the MLLMs while equipping them with the ability for manipulation. The fundamental insight lies in the introduced fine-tuning paradigm, encompassing object category understanding, affordance prior reasoning, and object-centric pose prediction to stimulate the reasoning ability of MLLM in manipulation. During inference, our approach utilizes an RGB image and text prompt to predict the end effector's pose in chain of thoughts. After the initial contact is established, an active impedance adaptation policy is introduced to plan the upcoming waypoints in a closed-loop manner. Moreover, in real world, we design a test-time adaptation (TTA) strategy for manipulation to enable the model better adapt to the current real-world scene configuration. Experiments in simulator and real-world show the promising performance of ManipLLM. More details and demonstrations can be found at https://sites.google.com/view/manipllm.
Bridging Zero-shot Object Navigation and Foundation Models through Pixel-Guided Navigation Skill
Sep 21, 2023


Zero-shot object navigation is a challenging task for home-assistance robots. This task emphasizes visual grounding, commonsense inference and locomotion abilities, where the first two are inherent in foundation models. But for the locomotion part, most works still depend on map-based planning approaches. The gap between RGB space and map space makes it difficult to directly transfer the knowledge from foundation models to navigation tasks. In this work, we propose a Pixel-guided Navigation skill (PixNav), which bridges the gap between the foundation models and the embodied navigation task. It is straightforward for recent foundation models to indicate an object by pixels, and with pixels as the goal specification, our method becomes a versatile navigation policy towards all different kinds of objects. Besides, our PixNav is a pure RGB-based policy that can reduce the cost of home-assistance robots. Experiments demonstrate the robustness of the PixNav which achieves 80+% success rate in the local path-planning task. To perform long-horizon object navigation, we design an LLM-based planner to utilize the commonsense knowledge between objects and rooms to select the best waypoint. Evaluations across both photorealistic indoor simulators and real-world environments validate the effectiveness of our proposed navigation strategy. Code and video demos are available at https://github.com/wzcai99/Pixel-Navigator.
Discuss Before Moving: Visual Language Navigation via Multi-expert Discussions
Sep 20, 2023



Visual language navigation (VLN) is an embodied task demanding a wide range of skills encompassing understanding, perception, and planning. For such a multifaceted challenge, previous VLN methods totally rely on one model's own thinking to make predictions within one round. However, existing models, even the most advanced large language model GPT4, still struggle with dealing with multiple tasks by single-round self-thinking. In this work, drawing inspiration from the expert consultation meeting, we introduce a novel zero-shot VLN framework. Within this framework, large models possessing distinct abilities are served as domain experts. Our proposed navigation agent, namely DiscussNav, can actively discuss with these experts to collect essential information before moving at every step. These discussions cover critical navigation subtasks like instruction understanding, environment perception, and completion estimation. Through comprehensive experiments, we demonstrate that discussions with domain experts can effectively facilitate navigation by perceiving instruction-relevant information, correcting inadvertent errors, and sifting through in-consistent movement decisions. The performances on the representative VLN task R2R show that our method surpasses the leading zero-shot VLN model by a large margin on all metrics. Additionally, real-robot experiments display the obvious advantages of our method over single-round self-thinking.
VDialogUE: A Unified Evaluation Benchmark for Visually-grounded Dialogue
Sep 14, 2023



Visually-grounded dialog systems, which integrate multiple modes of communication such as text and visual inputs, have become an increasingly popular area of investigation. However, the absence of a standardized evaluation framework poses a challenge in assessing the development of this field. To this end, we propose \textbf{VDialogUE}, a \textbf{V}isually-grounded \textbf{Dialog}ue benchmark for \textbf{U}nified \textbf{E}valuation. It defines five core multi-modal dialogue tasks and covers six datasets. Furthermore, in order to provide a comprehensive assessment of the model's performance across all tasks, we developed a novel evaluation metric called VDscore, which is based on the Analytic Hierarchy Process~(AHP) method. Additionally, we present a straightforward yet efficient baseline model, named \textbf{VISIT}~(\textbf{VIS}ually-grounded d\textbf{I}alog \textbf{T}ransformer), to promote the advancement of general multi-modal dialogue systems. It progressively builds its multi-modal foundation and dialogue capability via a two-stage pre-training strategy. We believe that the VDialogUE benchmark, along with the evaluation scripts and our baseline models, will accelerate the development of visually-grounded dialog systems and lead to the development of more sophisticated and effective pre-trained models.
Whether you can locate or not? Interactive Referring Expression Generation
Aug 19, 2023



Referring Expression Generation (REG) aims to generate unambiguous Referring Expressions (REs) for objects in a visual scene, with a dual task of Referring Expression Comprehension (REC) to locate the referred object. Existing methods construct REG models independently by using only the REs as ground truth for model training, without considering the potential interaction between REG and REC models. In this paper, we propose an Interactive REG (IREG) model that can interact with a real REC model, utilizing signals indicating whether the object is located and the visual region located by the REC model to gradually modify REs. Our experimental results on three RE benchmark datasets, RefCOCO, RefCOCO+, and RefCOCOg show that IREG outperforms previous state-of-the-art methods on popular evaluation metrics. Furthermore, a human evaluation shows that IREG generates better REs with the capability of interaction.
Multimodal Recommendation Dialog with Subjective Preference: A New Challenge and Benchmark
May 26, 2023Existing multimodal task-oriented dialog data fails to demonstrate the diverse expressions of user subjective preferences and recommendation acts in the real-life shopping scenario. This paper introduces a new dataset SURE (Multimodal Recommendation Dialog with SUbjective PREference), which contains 12K shopping dialogs in complex store scenes. The data is built in two phases with human annotations to ensure quality and diversity. SURE is well-annotated with subjective preferences and recommendation acts proposed by sales experts. A comprehensive analysis is given to reveal the distinguishing features of SURE. Three benchmark tasks are then proposed on the data to evaluate the capability of multimodal recommendation agents. Based on the SURE, we propose a baseline model, powered by a state-of-the-art multimodal model, for these tasks.
SPRING: Situated Conversation Agent Pretrained with Multimodal Questions from Incremental Layout Graph
Jan 05, 2023



Existing multimodal conversation agents have shown impressive abilities to locate absolute positions or retrieve attributes in simple scenarios, but they fail to perform well when complex relative positions and information alignments are involved, which poses a bottleneck in response quality. In this paper, we propose a Situated Conversation Agent Petrained with Multimodal Questions from INcremental Layout Graph (SPRING) with abilities of reasoning multi-hops spatial relations and connecting them with visual attributes in crowded situated scenarios. Specifically, we design two types of Multimodal Question Answering (MQA) tasks to pretrain the agent. All QA pairs utilized during pretraining are generated from novel Incremental Layout Graphs (ILG). QA pair difficulty labels automatically annotated by ILG are used to promote MQA-based Curriculum Learning. Experimental results verify the SPRING's effectiveness, showing that it significantly outperforms state-of-the-art approaches on both SIMMC 1.0 and SIMMC 2.0 datasets.