 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoupled Distributional Random Expert Distillation for World Model Online Imitation Learning
May 04, 2025Imitation Learning (IL) has achieved remarkable success across various domains, including robotics, autonomous driving, and healthcare, by enabling agents to learn complex behaviors from expert demonstrations. However, existing IL methods often face instability challenges, particularly when relying on adversarial reward or value formulations in world model frameworks. In this work, we propose a novel approach to online imitation learning that addresses these limitations through a reward model based on random network distillation (RND) for density estimation. Our reward model is built on the joint estimation of expert and behavioral distributions within the latent space of the world model. We evaluate our method across diverse benchmarks, including DMControl, Meta-World, and ManiSkill2, showcasing its ability to deliver stable performance and achieve expert-level results in both locomotion and manipulation tasks. Our approach demonstrates improved stability over adversarial methods while maintaining expert-level performance.
Diffusion Dynamics Models with Generative State Estimation for Cloth Manipulation
Mar 15, 2025Manipulating deformable objects like cloth is challenging due to their complex dynamics, near-infinite degrees of freedom, and frequent self-occlusions, which complicate state estimation and dynamics modeling. Prior work has struggled with robust cloth state estimation, while dynamics models, primarily based on Graph Neural Networks (GNNs), are limited by their locality. Inspired by recent advances in generative models, we hypothesize that these expressive models can effectively capture intricate cloth configurations and deformation patterns from data. Building on this insight, we propose a diffusion-based generative approach for both perception and dynamics modeling. Specifically, we formulate state estimation as reconstructing the full cloth state from sparse RGB-D observations conditioned on a canonical cloth mesh and dynamics modeling as predicting future states given the current state and robot actions. Leveraging a transformer-based diffusion model, our method achieves high-fidelity state reconstruction while reducing long-horizon dynamics prediction errors by an order of magnitude compared to GNN-based approaches. Integrated with model-predictive control (MPC), our framework successfully executes cloth folding on a real robotic system, demonstrating the potential of generative models for manipulation tasks with partial observability and complex dynamics.
Reward-free World Models for Online Imitation Learning
Oct 17, 2024Imitation learning (IL) enables agents to acquire skills directly from expert demonstrations, providing a compelling alternative to reinforcement learning. However, prior online IL approaches struggle with complex tasks characterized by high-dimensional inputs and complex dynamics. In this work, we propose a novel approach to online imitation learning that leverages reward-free world models. Our method learns environmental dynamics entirely in latent spaces without reconstruction, enabling efficient and accurate modeling. We adopt the inverse soft-Q learning objective, reformulating the optimization process in the Q-policy space to mitigate the instability associated with traditional optimization in the reward-policy space. By employing a learned latent dynamics model and planning for control, our approach consistently achieves stable, expert-level performance in tasks with high-dimensional observation or action spaces and intricate dynamics. We evaluate our method on a diverse set of benchmarks, including DMControl, MyoSuite, and ManiSkill2, demonstrating superior empirical performance compared to existing approaches.
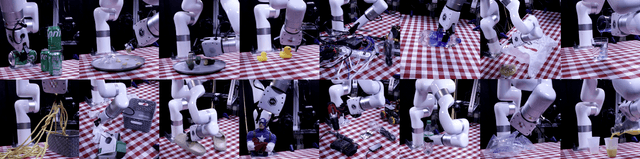
ManiSkill3: GPU Parallelized Robotics Simulation and Rendering for Generalizable Embodied AI
Oct 01, 2024



Simulation has enabled unprecedented compute-scalable approaches to robot learning. However, many existing simulation frameworks typically support a narrow range of scenes/tasks and lack features critical for scaling generalizable robotics and sim2real. We introduce and open source ManiSkill3, the fastest state-visual GPU parallelized robotics simulator with contact-rich physics targeting generalizable manipulation. ManiSkill3 supports GPU parallelization of many aspects including simulation+rendering, heterogeneous simulation, pointclouds/voxels visual input, and more. Simulation with rendering on ManiSkill3 can run 10-1000x faster with 2-3x less GPU memory usage than other platforms, achieving up to 30,000+ FPS in benchmarked environments due to minimal python/pytorch overhead in the system, simulation on the GPU, and the use of the SAPIEN parallel rendering system. Tasks that used to take hours to train can now take minutes. We further provide the most comprehensive range of GPU parallelized environments/tasks spanning 12 distinct domains including but not limited to mobile manipulation for tasks such as drawing, humanoids, and dextrous manipulation in realistic scenes designed by artists or real-world digital twins. In addition, millions of demonstration frames are provided from motion planning, RL, and teleoperation. ManiSkill3 also provides a comprehensive set of baselines that span popular RL and learning-from-demonstrations algorithms.
DiffVL: Scaling Up Soft Body Manipulation using Vision-Language Driven Differentiable Physics
Dec 11, 2023


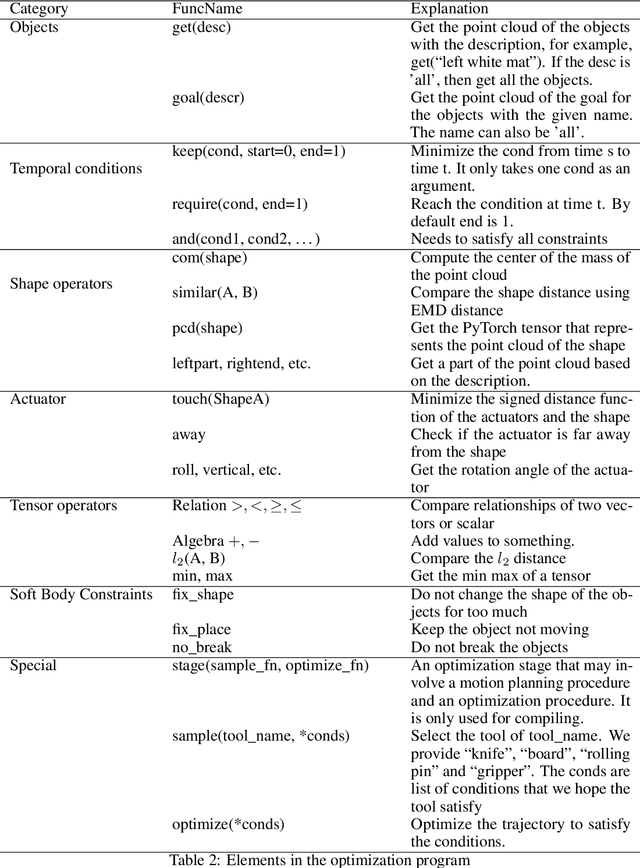
Combining gradient-based trajectory optimization with differentiable physics simulation is an efficient technique for solving soft-body manipulation problems. Using a well-crafted optimization objective, the solver can quickly converge onto a valid trajectory. However, writing the appropriate objective functions requires expert knowledge, making it difficult to collect a large set of naturalistic problems from non-expert users. We introduce DiffVL, a method that enables non-expert users to communicate soft-body manipulation tasks -- a combination of vision and natural language, given in multiple stages -- that can be readily leveraged by a differential physics solver. We have developed GUI tools that enable non-expert users to specify 100 tasks inspired by real-life soft-body manipulations from online videos, which we'll make public. We leverage large language models to translate task descriptions into machine-interpretable optimization objectives. The optimization objectives can help differentiable physics solvers to solve these long-horizon multistage tasks that are challenging for previous baselines.
Robo360: A 3D Omnispective Multi-Material Robotic Manipulation Dataset
Dec 09, 2023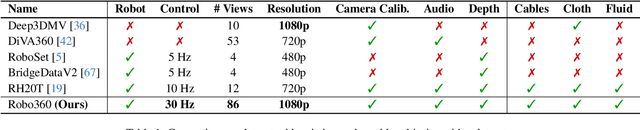
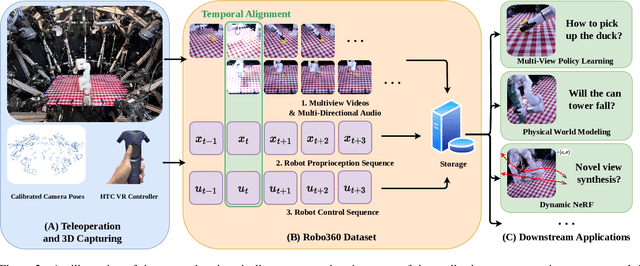
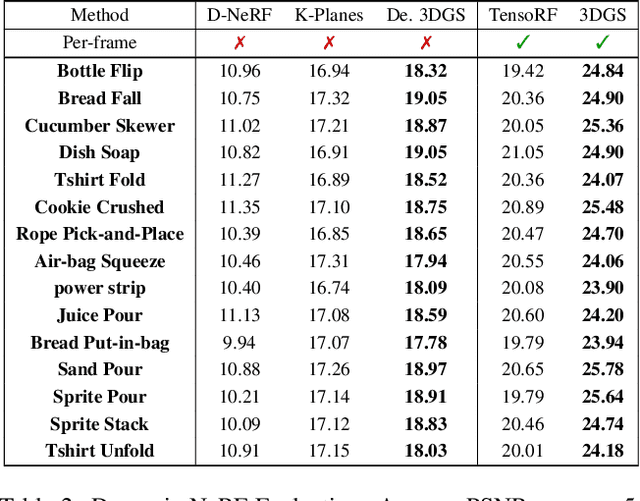
Building robots that can automate labor-intensive tasks has long been the core motivation behind the advancements in computer vision and the robotics community. Recent interest in leveraging 3D algorithms, particularly neural fields, has led to advancements in robot perception and physical understanding in manipulation scenarios. However, the real world's complexity poses significant challenges. To tackle these challenges, we present Robo360, a dataset that features robotic manipulation with a dense view coverage, which enables high-quality 3D neural representation learning, and a diverse set of objects with various physical and optical properties and facilitates research in various object manipulation and physical world modeling tasks. We confirm the effectiveness of our dataset using existing dynamic NeRF and evaluate its potential in learning multi-view policies. We hope that Robo360 can open new research directions yet to be explored at the intersection of understanding the physical world in 3D and robot control.
Reparameterized Policy Learning for Multimodal Trajectory Optimization
Jul 20, 2023



We investigate the challenge of parametrizing policies for reinforcement learning (RL) in high-dimensional continuous action spaces. Our objective is to develop a multimodal policy that overcomes limitations inherent in the commonly-used Gaussian parameterization. To achieve this, we propose a principled framework that models the continuous RL policy as a generative model of optimal trajectories. By conditioning the policy on a latent variable, we derive a novel variational bound as the optimization objective, which promotes exploration of the environment. We then present a practical model-based RL method, called Reparameterized Policy Gradient (RPG), which leverages the multimodal policy parameterization and learned world model to achieve strong exploration capabilities and high data efficiency. Empirical results demonstrate that our method can help agents evade local optima in tasks with dense rewards and solve challenging sparse-reward environments by incorporating an object-centric intrinsic reward. Our method consistently outperforms previous approaches across a range of tasks. Code and supplementary materials are available on the project page https://haosulab.github.io/RPG/
Deductive Verification of Chain-of-Thought Reasoning
Jun 07, 2023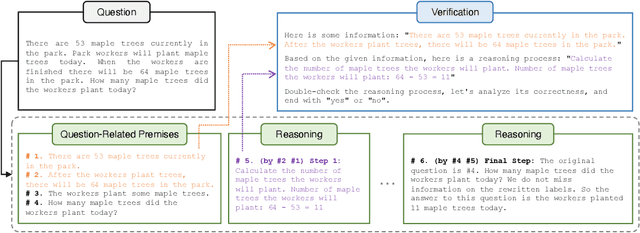
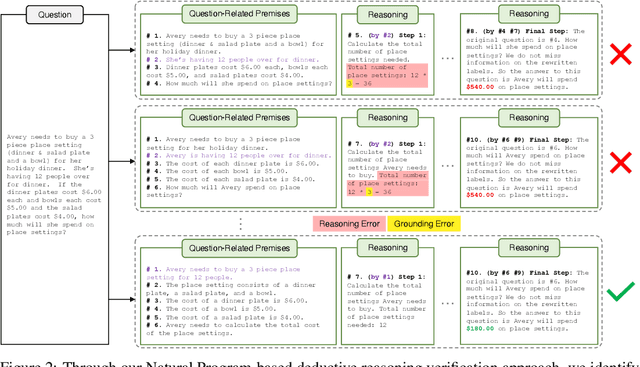
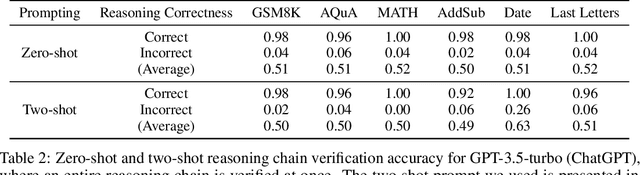

Large Language Models (LLMs) significantly benefit from Chain-of-Thought (CoT) prompting in performing various reasoning tasks. While CoT allows models to produce more comprehensive reasoning processes, its emphasis on intermediate reasoning steps can inadvertently introduce hallucinations and accumulated errors, thereby limiting models' ability to solve complex reasoning tasks. Inspired by how humans engage in careful and meticulous deductive logical reasoning processes to solve tasks, we seek to enable language models to perform explicit and rigorous deductive reasoning, and also ensure the trustworthiness of their reasoning process through self-verification. However, directly verifying the validity of an entire deductive reasoning process is challenging, even with advanced models like ChatGPT. In light of this, we propose to decompose a reasoning verification process into a series of step-by-step subprocesses, each only receiving their necessary context and premises. To facilitate this procedure, we propose Natural Program, a natural language-based deductive reasoning format. Our approach enables models to generate precise reasoning steps where subsequent steps are more rigorously grounded on prior steps. It also empowers language models to carry out reasoning self-verification in a step-by-step manner. By integrating this verification process into each deductive reasoning stage, we significantly enhance the rigor and trustfulness of generated reasoning steps. Along this process, we also improve the answer correctness on complex reasoning tasks. Code will be released at https://github.com/lz1oceani/verify_cot.
Chain-of-Thought Predictive Control
Apr 03, 2023


We study generalizable policy learning from demonstrations for complex low-level control tasks (e.g., contact-rich object manipulations). We propose an imitation learning method that incorporates the idea of temporal abstraction and the planning capabilities from Hierarchical RL (HRL) in a novel and effective manner. As a step towards decision foundation models, our design can utilize scalable, albeit highly sub-optimal, demonstrations. Specifically, we find certain short subsequences of the demos, i.e. the chain-of-thought (CoT), reflect their hierarchical structures by marking the completion of subgoals in the tasks. Our model learns to dynamically predict the entire CoT as coherent and structured long-term action guidance and consistently outperforms typical two-stage subgoal-conditioned policies. On the other hand, such CoT facilitates generalizable policy learning as they exemplify the decision patterns shared among demos (even those with heavy noises and randomness). Our method, Chain-of-Thought Predictive Control (CoTPC), significantly outperforms existing ones on challenging low-level manipulation tasks from scalable yet highly sub-optimal demos.
DexDeform: Dexterous Deformable Object Manipulation with Human Demonstrations and Differentiable Physics
Mar 27, 2023



In this work, we aim to learn dexterous manipulation of deformable objects using multi-fingered hands. Reinforcement learning approaches for dexterous rigid object manipulation would struggle in this setting due to the complexity of physics interaction with deformable objects. At the same time, previous trajectory optimization approaches with differentiable physics for deformable manipulation would suffer from local optima caused by the explosion of contact modes from hand-object interactions. To address these challenges, we propose DexDeform, a principled framework that abstracts dexterous manipulation skills from human demonstration and refines the learned skills with differentiable physics. Concretely, we first collect a small set of human demonstrations using teleoperation. And we then train a skill model using demonstrations for planning over action abstractions in imagination. To explore the goal space, we further apply augmentations to the existing deformable shapes in demonstrations and use a gradient optimizer to refine the actions planned by the skill model. Finally, we adopt the refined trajectories as new demonstrations for finetuning the skill model. To evaluate the effectiveness of our approach, we introduce a suite of six challenging dexterous deformable object manipulation tasks. Compared with baselines, DexDeform is able to better explore and generalize across novel goals unseen in the initial human demonstrations.