 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeULTRA: Unified Multimodal Control for Autonomous Humanoid Whole-Body Loco-Manipulation
Mar 03, 2026Achieving autonomous and versatile whole-body loco-manipulation remains a central barrier to making humanoids practically useful. Yet existing approaches are fundamentally constrained: retargeted data are often scarce or low-quality; methods struggle to scale to large skill repertoires; and, most importantly, they rely on tracking predefined motion references rather than generating behavior from perception and high-level task specifications. To address these limitations, we propose ULTRA, a unified framework with two key components. First, we introduce a physics-driven neural retargeting algorithm that translates large-scale motion capture to humanoid embodiments while preserving physical plausibility for contact-rich interactions. Second, we learn a unified multimodal controller that supports both dense references and sparse task specifications, under sensing ranging from accurate motion-capture state to noisy egocentric visual inputs. We distill a universal tracking policy into this controller, compress motor skills into a compact latent space, and apply reinforcement learning finetuning to expand coverage and improve robustness under out-of-distribution scenarios. This enables coordinated whole-body behavior from sparse intent without test-time reference motions. We evaluate ULTRA in simulation and on a real Unitree G1 humanoid. Results show that ULTRA generalizes to autonomous, goal-conditioned whole-body loco-manipulation from egocentric perception, consistently outperforming tracking-only baselines with limited skills.
Dexplore: Scalable Neural Control for Dexterous Manipulation from Reference-Scoped Exploration
Sep 11, 2025Hand-object motion-capture (MoCap) repositories offer large-scale, contact-rich demonstrations and hold promise for scaling dexterous robotic manipulation. Yet demonstration inaccuracies and embodiment gaps between human and robot hands limit the straightforward use of these data. Existing methods adopt a three-stage workflow, including retargeting, tracking, and residual correction, which often leaves demonstrations underused and compound errors across stages. We introduce Dexplore, a unified single-loop optimization that jointly performs retargeting and tracking to learn robot control policies directly from MoCap at scale. Rather than treating demonstrations as ground truth, we use them as soft guidance. From raw trajectories, we derive adaptive spatial scopes, and train with reinforcement learning to keep the policy in-scope while minimizing control effort and accomplishing the task. This unified formulation preserves demonstration intent, enables robot-specific strategies to emerge, improves robustness to noise, and scales to large demonstration corpora. We distill the scaled tracking policy into a vision-based, skill-conditioned generative controller that encodes diverse manipulation skills in a rich latent representation, supporting generalization across objects and real-world deployment. Taken together, these contributions position Dexplore as a principled bridge that transforms imperfect demonstrations into effective training signals for dexterous manipulation.
Robo360: A 3D Omnispective Multi-Material Robotic Manipulation Dataset
Dec 09, 2023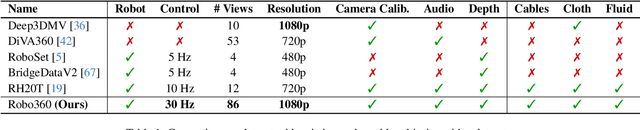
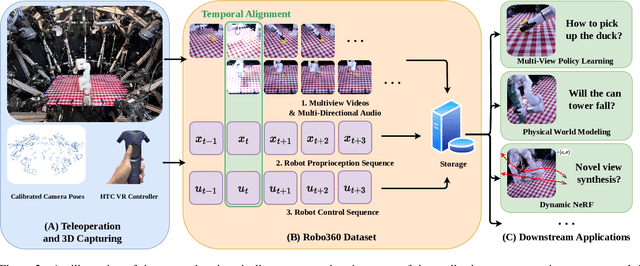
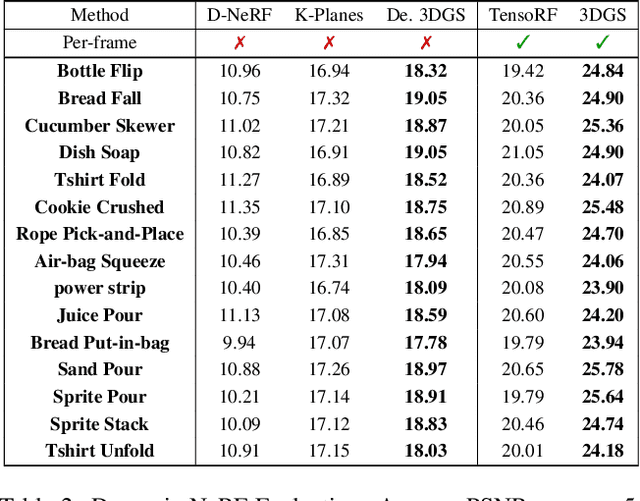
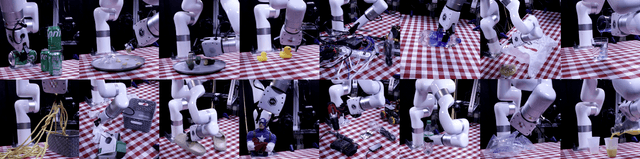
Building robots that can automate labor-intensive tasks has long been the core motivation behind the advancements in computer vision and the robotics community. Recent interest in leveraging 3D algorithms, particularly neural fields, has led to advancements in robot perception and physical understanding in manipulation scenarios. However, the real world's complexity poses significant challenges. To tackle these challenges, we present Robo360, a dataset that features robotic manipulation with a dense view coverage, which enables high-quality 3D neural representation learning, and a diverse set of objects with various physical and optical properties and facilitates research in various object manipulation and physical world modeling tasks. We confirm the effectiveness of our dataset using existing dynamic NeRF and evaluate its potential in learning multi-view policies. We hope that Robo360 can open new research directions yet to be explored at the intersection of understanding the physical world in 3D and robot control.
TransTouch: Learning Transparent Objects Depth Sensing Through Sparse Touches
Sep 18, 2023Transparent objects are common in daily life. However, depth sensing for transparent objects remains a challenging problem. While learning-based methods can leverage shape priors to improve the sensing quality, the labor-intensive data collection in the real world and the sim-to-real domain gap restrict these methods' scalability. In this paper, we propose a method to finetune a stereo network with sparse depth labels automatically collected using a probing system with tactile feedback. We present a novel utility function to evaluate the benefit of touches. By approximating and optimizing the utility function, we can optimize the probing locations given a fixed touching budget to better improve the network's performance on real objects. We further combine tactile depth supervision with a confidence-based regularization to prevent over-fitting during finetuning. To evaluate the effectiveness of our method, we construct a real-world dataset including both diffuse and transparent objects. Experimental results on this dataset show that our method can significantly improve real-world depth sensing accuracy, especially for transparent objects.