 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge$π^{*}_{0.6}$: a VLA That Learns From Experience
Nov 19, 2025We study how vision-language-action (VLA) models can improve through real-world deployments via reinforcement learning (RL). We present a general-purpose method, RL with Experience and Corrections via Advantage-conditioned Policies (RECAP), that provides for RL training of VLAs via advantage conditioning. Our method incorporates heterogeneous data into the self-improvement process, including demonstrations, data from on-policy collection, and expert teleoperated interventions provided during autonomous execution. RECAP starts by pre-training a generalist VLA with offline RL, which we call $π^{*}_{0.6}$, that can then be specialized to attain high performance on downstream tasks through on-robot data collection. We show that the $π^{*}_{0.6}$ model trained with the full RECAP method can fold laundry in real homes, reliably assemble boxes, and make espresso drinks using a professional espresso machine. On some of the hardest tasks, RECAP more than doubles task throughput and roughly halves the task failure rate.
Lumine: An Open Recipe for Building Generalist Agents in 3D Open Worlds
Nov 12, 2025
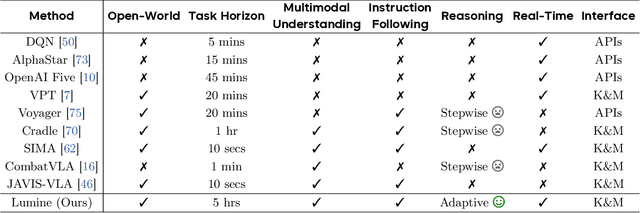
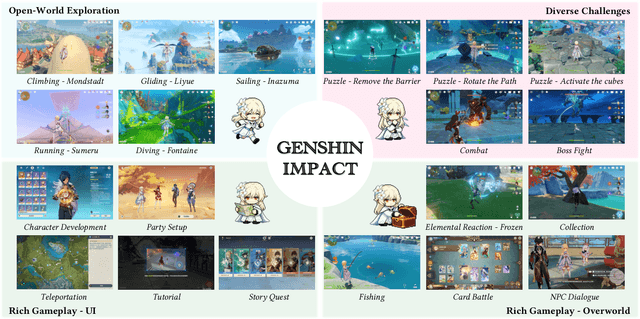
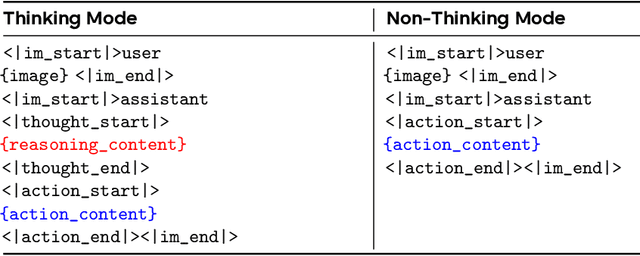
We introduce Lumine, the first open recipe for developing generalist agents capable of completing hours-long complex missions in real time within challenging 3D open-world environments. Lumine adopts a human-like interaction paradigm that unifies perception, reasoning, and action in an end-to-end manner, powered by a vision-language model. It processes raw pixels at 5 Hz to produce precise 30 Hz keyboard-mouse actions and adaptively invokes reasoning only when necessary. Trained in Genshin Impact, Lumine successfully completes the entire five-hour Mondstadt main storyline on par with human-level efficiency and follows natural language instructions to perform a broad spectrum of tasks in both 3D open-world exploration and 2D GUI manipulation across collection, combat, puzzle-solving, and NPC interaction. In addition to its in-domain performance, Lumine demonstrates strong zero-shot cross-game generalization. Without any fine-tuning, it accomplishes 100-minute missions in Wuthering Waves and the full five-hour first chapter of Honkai: Star Rail. These promising results highlight Lumine's effectiveness across distinct worlds and interaction dynamics, marking a concrete step toward generalist agents in open-ended environments.
Artificial Hippocampus Networks for Efficient Long-Context Modeling
Oct 08, 2025Long-sequence modeling faces a fundamental trade-off between the efficiency of compressive fixed-size memory in RNN-like models and the fidelity of lossless growing memory in attention-based Transformers. Inspired by the Multi-Store Model in cognitive science, we introduce a memory framework of artificial neural networks. Our method maintains a sliding window of the Transformer's KV cache as lossless short-term memory, while a learnable module termed Artificial Hippocampus Network (AHN) recurrently compresses out-of-window information into a fixed-size compact long-term memory. To validate this framework, we instantiate AHNs using modern RNN-like architectures, including Mamba2, DeltaNet, and Gated DeltaNet. Extensive experiments on long-context benchmarks LV-Eval and InfiniteBench demonstrate that AHN-augmented models consistently outperform sliding window baselines and achieve performance comparable or even superior to full-attention models, while substantially reducing computational and memory requirements. For instance, augmenting the Qwen2.5-3B-Instruct with AHNs reduces inference FLOPs by 40.5% and memory cache by 74.0%, while improving its average score on LV-Eval (128k sequence length) from 4.41 to 5.88. Code is available at: https://github.com/ByteDance-Seed/AHN.
EgoVLA: Learning Vision-Language-Action Models from Egocentric Human Videos
Jul 16, 2025Real robot data collection for imitation learning has led to significant advancements in robotic manipulation. However, the requirement for robot hardware in the process fundamentally constrains the scale of the data. In this paper, we explore training Vision-Language-Action (VLA) models using egocentric human videos. The benefit of using human videos is not only for their scale but more importantly for the richness of scenes and tasks. With a VLA trained on human video that predicts human wrist and hand actions, we can perform Inverse Kinematics and retargeting to convert the human actions to robot actions. We fine-tune the model using a few robot manipulation demonstrations to obtain the robot policy, namely EgoVLA. We propose a simulation benchmark called Isaac Humanoid Manipulation Benchmark, where we design diverse bimanual manipulation tasks with demonstrations. We fine-tune and evaluate EgoVLA with Isaac Humanoid Manipulation Benchmark and show significant improvements over baselines and ablate the importance of human data. Videos can be found on our website: https://rchalyang.github.io/EgoVLA
Seed1.5-VL Technical Report
May 11, 2025



We present Seed1.5-VL, a vision-language foundation model designed to advance general-purpose multimodal understanding and reasoning. Seed1.5-VL is composed with a 532M-parameter vision encoder and a Mixture-of-Experts (MoE) LLM of 20B active parameters. Despite its relatively compact architecture, it delivers strong performance across a wide spectrum of public VLM benchmarks and internal evaluation suites, achieving the state-of-the-art performance on 38 out of 60 public benchmarks. Moreover, in agent-centric tasks such as GUI control and gameplay, Seed1.5-VL outperforms leading multimodal systems, including OpenAI CUA and Claude 3.7. Beyond visual and video understanding, it also demonstrates strong reasoning abilities, making it particularly effective for multimodal reasoning challenges such as visual puzzles. We believe these capabilities will empower broader applications across diverse tasks. In this report, we mainly provide a comprehensive review of our experiences in building Seed1.5-VL across model design, data construction, and training at various stages, hoping that this report can inspire further research. Seed1.5-VL is now accessible at https://www.volcengine.com/ (Volcano Engine Model ID: doubao-1-5-thinking-vision-pro-250428)
WorldModelBench: Judging Video Generation Models As World Models
Feb 28, 2025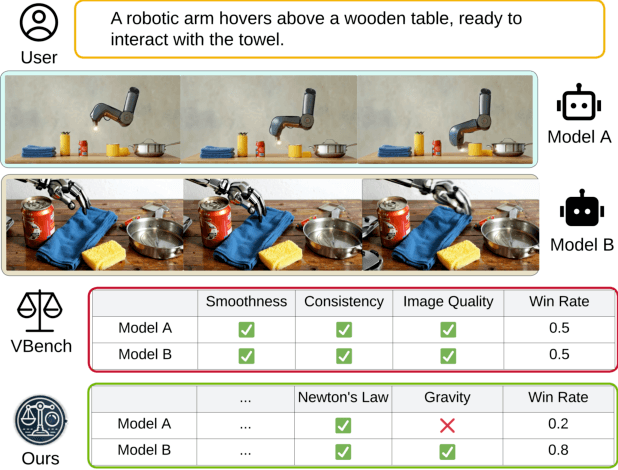
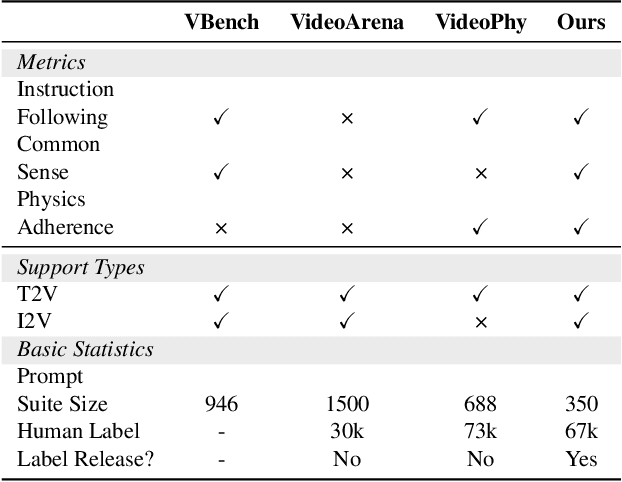
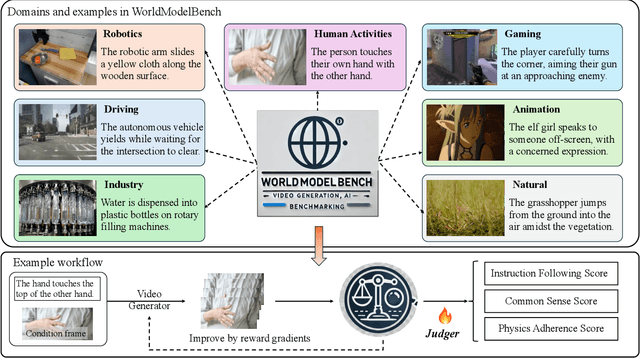
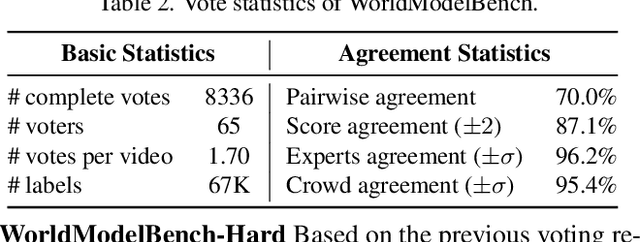
Video generation models have rapidly progressed, positioning themselves as video world models capable of supporting decision-making applications like robotics and autonomous driving. However, current benchmarks fail to rigorously evaluate these claims, focusing only on general video quality, ignoring important factors to world models such as physics adherence. To bridge this gap, we propose WorldModelBench, a benchmark designed to evaluate the world modeling capabilities of video generation models in application-driven domains. WorldModelBench offers two key advantages: (1) Against to nuanced world modeling violations: By incorporating instruction-following and physics-adherence dimensions, WorldModelBench detects subtle violations, such as irregular changes in object size that breach the mass conservation law - issues overlooked by prior benchmarks. (2) Aligned with large-scale human preferences: We crowd-source 67K human labels to accurately measure 14 frontier models. Using our high-quality human labels, we further fine-tune an accurate judger to automate the evaluation procedure, achieving 8.6% higher average accuracy in predicting world modeling violations than GPT-4o with 2B parameters. In addition, we demonstrate that training to align human annotations by maximizing the rewards from the judger noticeably improve the world modeling capability. The website is available at https://worldmodelbench-team.github.io.
Policy Decorator: Model-Agnostic Online Refinement for Large Policy Model
Dec 18, 2024



Recent advancements in robot learning have used imitation learning with large models and extensive demonstrations to develop effective policies. However, these models are often limited by the quantity, quality, and diversity of demonstrations. This paper explores improving offline-trained imitation learning models through online interactions with the environment. We introduce Policy Decorator, which uses a model-agnostic residual policy to refine large imitation learning models during online interactions. By implementing controlled exploration strategies, Policy Decorator enables stable, sample-efficient online learning. Our evaluation spans eight tasks across two benchmarks-ManiSkill and Adroit-and involves two state-of-the-art imitation learning models (Behavior Transformer and Diffusion Policy). The results show Policy Decorator effectively improves the offline-trained policies and preserves the smooth motion of imitation learning models, avoiding the erratic behaviors of pure RL policies. See our project page (https://policydecorator.github.io) for videos.
NVILA: Efficient Frontier Visual Language Models
Dec 05, 2024
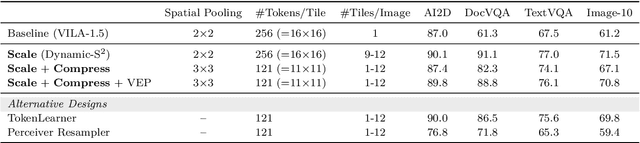
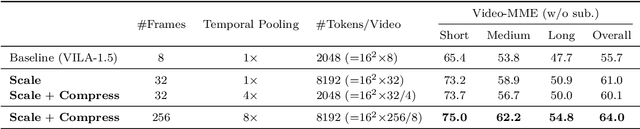
Visual language models (VLMs) have made significant advances in accuracy in recent years. However, their efficiency has received much less attention. This paper introduces NVILA, a family of open VLMs designed to optimize both efficiency and accuracy. Building on top of VILA, we improve its model architecture by first scaling up the spatial and temporal resolutions, and then compressing visual tokens. This "scale-then-compress" approach enables NVILA to efficiently process high-resolution images and long videos. We also conduct a systematic investigation to enhance the efficiency of NVILA throughout its entire lifecycle, from training and fine-tuning to deployment. NVILA matches or surpasses the accuracy of many leading open and proprietary VLMs across a wide range of image and video benchmarks. At the same time, it reduces training costs by 4.5X, fine-tuning memory usage by 3.4X, pre-filling latency by 1.6-2.2X, and decoding latency by 1.2-2.8X. We will soon make our code and models available to facilitate reproducibility.
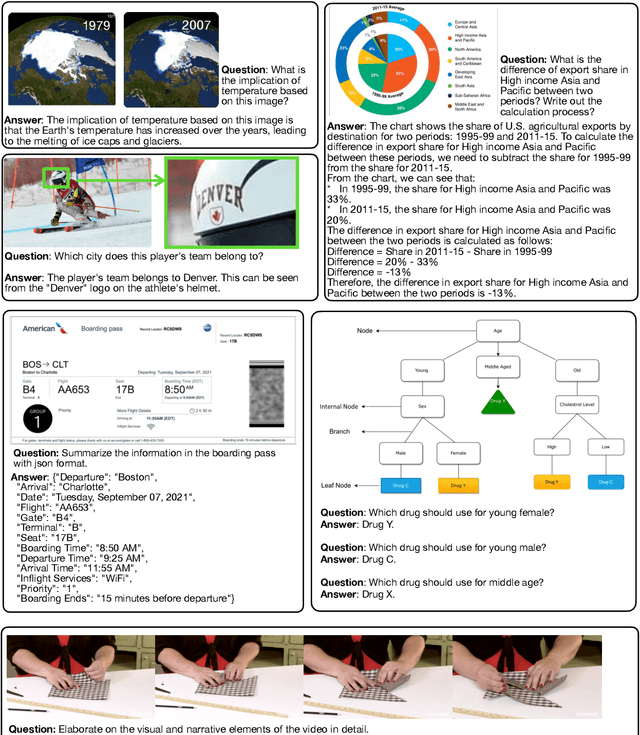
VILA-U: a Unified Foundation Model Integrating Visual Understanding and Generation
Sep 06, 2024


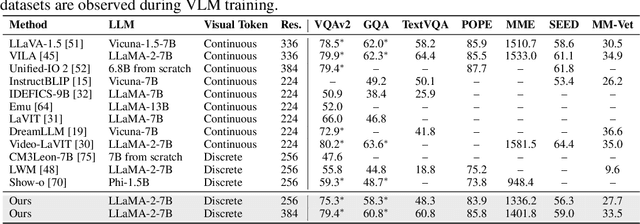
VILA-U is a Unified foundation model that integrates Video, Image, Language understanding and generation. Traditional visual language models (VLMs) use separate modules for understanding and generating visual content, which can lead to misalignment and increased complexity. In contrast, VILA-U employs a single autoregressive next-token prediction framework for both tasks, eliminating the need for additional components like diffusion models. This approach not only simplifies the model but also achieves near state-of-the-art performance in visual language understanding and generation. The success of VILA-U is attributed to two main factors: the unified vision tower that aligns discrete visual tokens with textual inputs during pretraining, which enhances visual perception, and autoregressive image generation can achieve similar quality as diffusion models with high-quality dataset. This allows VILA-U to perform comparably to more complex models using a fully token-based autoregressive framework.
LongVILA: Scaling Long-Context Visual Language Models for Long Videos
Aug 21, 2024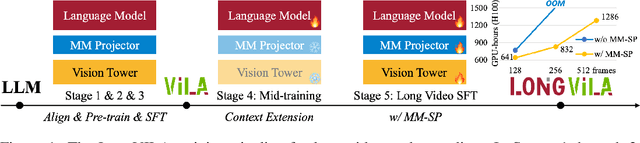

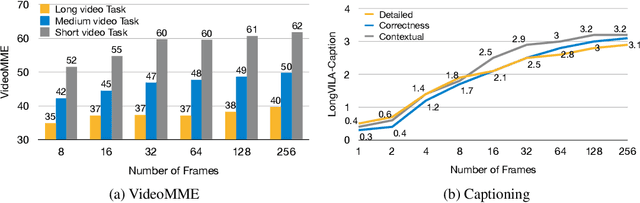
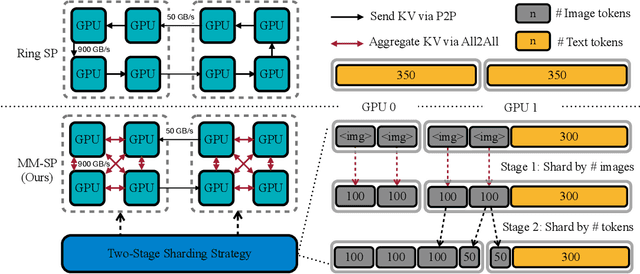
Long-context capability is critical for multi-modal foundation models, especially for long video understanding. We introduce LongVILA, a full-stack solution for long-context visual-language models by co-designing the algorithm and system. For model training, we upgrade existing VLMs to support long video understanding by incorporating two additional stages, i.e., long context extension and long supervised fine-tuning. However, training on long video is computationally and memory intensive. We introduce the long-context Multi-Modal Sequence Parallelism (MM-SP) system that efficiently parallelizes long video training and inference, enabling 2M context length training on 256 GPUs without any gradient checkpointing. LongVILA efficiently extends the number of video frames of VILA from 8 to 1024, improving the long video captioning score from 2.00 to 3.26 (out of 5), achieving 99.5% accuracy in 1400-frame (274k context length) video needle-in-a-haystack. LongVILA-8B demonstrates consistent accuracy improvements on long videos in the VideoMME benchmark as the number of frames increases. Besides, MM-SP is 2.1x - 5.7x faster than ring sequence parallelism and 1.1x - 1.4x faster than Megatron with context parallelism + tensor parallelism. Moreover, it seamlessly integrates with Hugging Face Transformers.