 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFLAP: FOV-Constrained Active Perception Planning for Prior-Map-Free 3D Navigation
Jun 16, 2026Safe and efficient trajectory planning in unknown, cluttered 3D environments constitutes a critical bottleneck for deploying Unmanned Aerial Vehicles (UAVs) in real-world applications. This challenge is further exacerbated by the limited field-of-view (FOV) and sensing range of onboard sensors. Many existing methods either make simplistic assumptions about unexplored space or rely on conservative heuristics such as speed limits or fixed perception patterns, reducing efficiency and generalizing poorly across different sensor types. In this work, we propose a novel planning framework that directly integrates active perception into trajectory optimization, thereby improving safety while preserving efficiency. The perception constraints are derived from the UAV's dynamic model and formulated in the sensor coordinate frame, which enables precise handling of FOV geometry. The velocity-triggered activation mechanism enables the planner to balance perception and motion efficiency. We introduce an active perception sub-trajectory segment with parametric start-time optimization, mitigating collision risks from late obstacle detection. Our formulation enables active perception during arbitrary 3D maneuvers, extending beyond prior methods designed mainly for horizontal motion. All constraints and penalties are incorporated into a differentiable optimization problem, so the planner requires only a simple front-end global path for guidance, rather than a computationally expensive perception-aware path generator. Extensive simulations and real-world experiments demonstrate robust performance across diverse unknown environments with varying sensor configurations.
Explore From Sketch: Accelerating UAV Exploration in Large-scale Environments with Prior Maps
Jun 10, 2026Autonomous exploration with UAVs in large-scale, topologically complex environments often suffers from low efficiency due to suboptimal scheduling and detours. Prior maps (e.g., construction drawings), although usually imprecise and flawed, are readily available in many scenarios and have the potential to provide global structural guidance. This paper presents a novel exploration framework that leverages sparse, unaligned, and even discrepant 2D prior maps for LiDAR-based UAV exploration. First, a robust 2D-3D point cloud registration pipeline is proposed to align LiDAR observations with prior maps. The registration pipeline combines a GeoContext descriptor for single-frame candidate retrieval, a multi-frame verification mechanism for coarse transformation estimation with outlier rejection, and a Scale-ICP algorithm for refinement. The registration module can handle map discrepancies and provide multiple hypotheses when geometric ambiguities arise. To effectively utilize the registration results for exploration planning, we further develop a hierarchical viewpoint planning strategy under localization uncertainties. The hierarchical strategy first spatially attaches local viewpoints to prior guidepoints and adopts a Monte Carlo Tree Search solver to determine their traversal sequence under each registration hypothesis. To mitigate registration uncertainty, a risk-aware selector evaluates prior sequences using confidence-weighted travel risk, and a fixed-endpoint traveling salesman problem is formulated to generate an efficient local coverage path under the selected prior guidance. Benchmark evaluations reveal up to 34.2% improvement in exploration efficiency and 37.9% reduction in flight distance compared to state-of-the-art methods, while extensive simulations and field experiments further demonstrate robustness to prior map incompleteness and deformations.
TriphiBot: A Triphibious Robot Combining FOC-based Propulsion with Eccentric Design
Feb 01, 2026Triphibious robots capable of multi-domain motion and cross-domain transitions are promising to handle complex tasks across diverse environments. However, existing designs primarily focus on dual-mode platforms, and some designs suffer from high mechanical complexity or low propulsion efficiency, which limits their application. In this paper, we propose a novel triphibious robot capable of aerial, terrestrial, and aquatic motion, by a minimalist design combining a quadcopter structure with two passive wheels, without extra actuators. To address inefficiency of ground-support motion (moving on land/seabed) for quadcopter based designs, we introduce an eccentric Center of Gravity (CoG) design that inherently aligns thrust with motion, enhancing efficiency without specialized mechanical transformation designs. Furthermore, to address the drastic differences in motion control caused by different fluids (air and water), we develop a unified propulsion system based on Field-Oriented Control (FOC). This method resolves torque matching issues and enables precise, rapid bidirectional thrust across different mediums. Grounded in the perspective of living condition and ground support, we analyse the robot's dynamics and propose a Hybrid Nonlinear Model Predictive Control (HNMPC)-PID control system to ensure stable multi-domain motion and seamless transitions. Experimental results validate the robot's multi-domain motion and cross-mode transition capability, along with the efficiency and adaptability of the proposed propulsion system.
Trajectory Optimization for Differential Drive Mobile Manipulators via Topological Paths Search and Arc Length-Yaw Parameterization
Jul 03, 2025We present an efficient hierarchical motion planning pipeline for differential drive mobile manipulators. Our approach first searches for multiple collisionfree and topologically distinct paths for the mobile base to extract the space in which optimal solutions may exist. Further sampling and optimization are then conducted in parallel to explore feasible whole-body trajectories. For trajectory optimization, we employ polynomial trajectories and arc length-yaw parameterization, enabling efficient handling of the nonholonomic dynamics while ensuring optimality.
Efficient Trajectory Generation Based on Traversable Planes in 3D Complex Architectural Spaces
Mar 11, 2025With the increasing integration of robots into human life, their role in architectural spaces where people spend most of their time has become more prominent. While motion capabilities and accurate localization for automated robots have rapidly developed, the challenge remains to generate efficient, smooth, comprehensive, and high-quality trajectories in these areas. In this paper, we propose a novel efficient planner for ground robots to autonomously navigate in large complex multi-layered architectural spaces. Considering that traversable regions typically include ground, slopes, and stairs, which are planar or nearly planar structures, we simplify the problem to navigation within and between complex intersecting planes. We first extract traversable planes from 3D point clouds through segmenting, merging, classifying, and connecting to build a plane-graph, which is lightweight but fully represents the traversable regions. We then build a trajectory optimization based on motion state trajectory and fully consider special constraints when crossing multi-layer planes to maximize the robot's maneuverability. We conduct experiments in simulated environments and test on a CubeTrack robot in real-world scenarios, validating the method's effectiveness and practicality.
Real-time Spatial-temporal Traversability Assessment via Feature-based Sparse Gaussian Process
Mar 06, 2025Terrain analysis is critical for the practical application of ground mobile robots in real-world tasks, especially in outdoor unstructured environments. In this paper, we propose a novel spatial-temporal traversability assessment method, which aims to enable autonomous robots to effectively navigate through complex terrains. Our approach utilizes sparse Gaussian processes (SGP) to extract geometric features (curvature, gradient, elevation, etc.) directly from point cloud scans. These features are then used to construct a high-resolution local traversability map. Then, we design a spatial-temporal Bayesian Gaussian kernel (BGK) inference method to dynamically evaluate traversability scores, integrating historical and real-time data while considering factors such as slope, flatness, gradient, and uncertainty metrics. GPU acceleration is applied in the feature extraction step, and the system achieves real-time performance. Extensive simulation experiments across diverse terrain scenarios demonstrate that our method outperforms SOTA approaches in both accuracy and computational efficiency. Additionally, we develop an autonomous navigation framework integrated with the traversability map and validate it with a differential driven vehicle in complex outdoor environments. Our code will be open-source for further research and development by the community, https://github.com/ZJU-FAST-Lab/FSGP_BGK.
Policy Decorator: Model-Agnostic Online Refinement for Large Policy Model
Dec 18, 2024



Recent advancements in robot learning have used imitation learning with large models and extensive demonstrations to develop effective policies. However, these models are often limited by the quantity, quality, and diversity of demonstrations. This paper explores improving offline-trained imitation learning models through online interactions with the environment. We introduce Policy Decorator, which uses a model-agnostic residual policy to refine large imitation learning models during online interactions. By implementing controlled exploration strategies, Policy Decorator enables stable, sample-efficient online learning. Our evaluation spans eight tasks across two benchmarks-ManiSkill and Adroit-and involves two state-of-the-art imitation learning models (Behavior Transformer and Diffusion Policy). The results show Policy Decorator effectively improves the offline-trained policies and preserves the smooth motion of imitation learning models, avoiding the erratic behaviors of pure RL policies. See our project page (https://policydecorator.github.io) for videos.
Universal Trajectory Optimization Framework for Differential-Driven Robot Class
Sep 12, 2024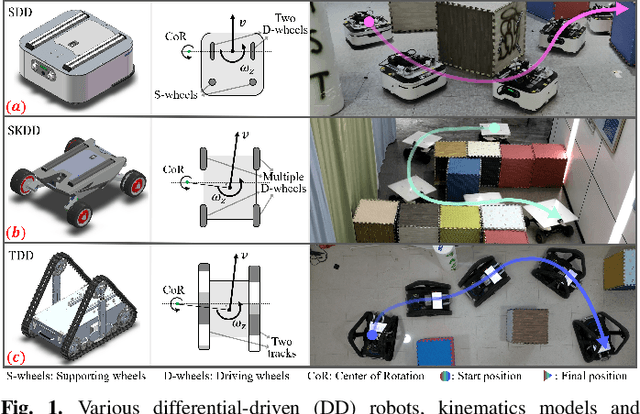
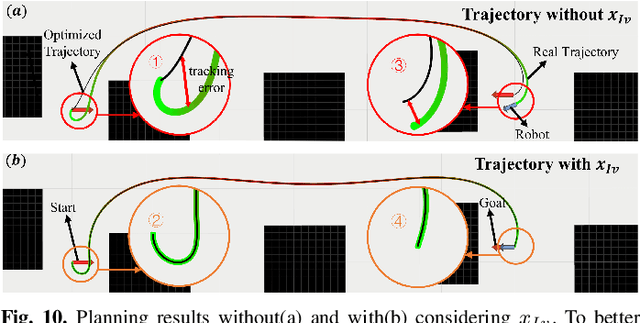
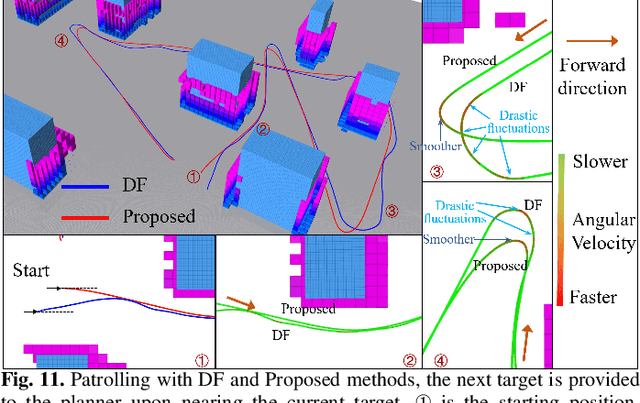
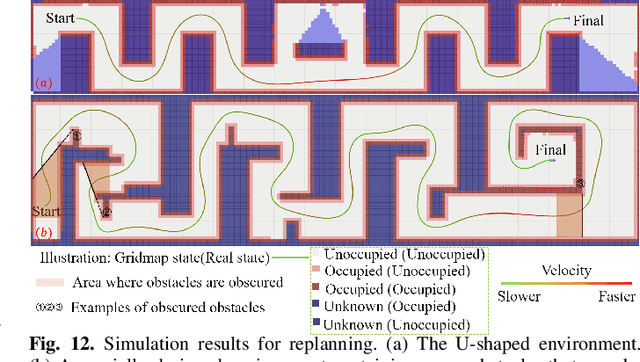
Differential-driven robots are widely used in various scenarios thanks to their straightforward principle, from household service robots to disaster response field robots. There are several different types of deriving mechanisms considering the real-world applications, including two-wheeled, four-wheeled skid-steering, tracked robots, etc. The differences in the driving mechanism usually require specific kinematic modeling when precise controlling is desired. Furthermore, the nonholonomic dynamics and possible lateral slip lead to different degrees of difficulty in getting feasible and high-quality trajectories. Therefore, a comprehensive trajectory optimization framework to compute trajectories efficiently for various kinds of differential-driven robots is highly desirable. In this paper, we propose a universal trajectory optimization framework that can be applied to differential-driven robot class, enabling the generation of high-quality trajectories within a restricted computational timeframe. We introduce a novel trajectory representation based on polynomial parameterization of motion states or their integrals, such as angular and linear velocities, that inherently matching robots' motion to the control principle for differential-driven robot class. The trajectory optimization problem is formulated to minimize complexity while prioritizing safety and operational efficiency. We then build a full-stack autonomous planning and control system to show the feasibility and robustness. We conduct extensive simulations and real-world testing in crowded environments with three kinds of differential-driven robots to validate the effectiveness of our approach. We will release our method as an open-source package.
LatticeGen: A Cooperative Framework which Hides Generated Text in a Lattice for Privacy-Aware Generation on Cloud
Oct 02, 2023



In the current user-server interaction paradigm of prompted generation with large language models (LLM) on cloud, the server fully controls the generation process, which leaves zero options for users who want to keep the generated text to themselves. We propose LatticeGen, a cooperative framework in which the server still handles most of the computation while the user controls the sampling operation. The key idea is that the true generated sequence is mixed with noise tokens by the user and hidden in a noised lattice. Considering potential attacks from a hypothetically malicious server and how the user can defend against it, we propose the repeated beam-search attack and the mixing noise scheme. In our experiments we apply LatticeGen to protect both prompt and generation. It is shown that while the noised lattice degrades generation quality, LatticeGen successfully protects the true generation to a remarkable degree under strong attacks (more than 50% of the semantic remains hidden as measured by BERTScore).
Scalable neural network models and terascale datasets for particle-flow reconstruction
Sep 13, 2023We study scalable machine learning models for full event reconstruction in high-energy electron-positron collisions based on a highly granular detector simulation. Particle-flow (PF) reconstruction can be formulated as a supervised learning task using tracks and calorimeter clusters or hits. We compare a graph neural network and kernel-based transformer and demonstrate that both avoid quadratic memory allocation and computational cost while achieving realistic PF reconstruction. We show that hyperparameter tuning on a supercomputer significantly improves the physics performance of the models. We also demonstrate that the resulting model is highly portable across hardware processors, supporting Nvidia, AMD, and Intel Habana cards. Finally, we demonstrate that the model can be trained on highly granular inputs consisting of tracks and calorimeter hits, resulting in a competitive physics performance with the baseline. Datasets and software to reproduce the studies are published following the findable, accessible, interoperable, and reusable (FAIR) principles.