 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVLA-AN: An Efficient and Onboard Vision-Language-Action Framework for Aerial Navigation in Complex Environments
Dec 19, 2025



This paper proposes VLA-AN, an efficient and onboard Vision-Language-Action (VLA) framework dedicated to autonomous drone navigation in complex environments. VLA-AN addresses four major limitations of existing large aerial navigation models: the data domain gap, insufficient temporal navigation with reasoning, safety issues with generative action policies, and onboard deployment constraints. First, we construct a high-fidelity dataset utilizing 3D Gaussian Splatting (3D-GS) to effectively bridge the domain gap. Second, we introduce a progressive three-stage training framework that sequentially reinforces scene comprehension, core flight skills, and complex navigation capabilities. Third, we design a lightweight, real-time action module coupled with geometric safety correction. This module ensures fast, collision-free, and stable command generation, mitigating the safety risks inherent in stochastic generative policies. Finally, through deep optimization of the onboard deployment pipeline, VLA-AN achieves a robust real-time 8.3x improvement in inference throughput on resource-constrained UAVs. Extensive experiments demonstrate that VLA-AN significantly improves spatial grounding, scene reasoning, and long-horizon navigation, achieving a maximum single-task success rate of 98.1%, and providing an efficient, practical solution for realizing full-chain closed-loop autonomy in lightweight aerial robots.
Flying in Clutter on Monocular RGB by Learning in 3D Radiance Fields with Domain Adaptation
Dec 19, 2025Modern autonomous navigation systems predominantly rely on lidar and depth cameras. However, a fundamental question remains: Can flying robots navigate in clutter using solely monocular RGB images? Given the prohibitive costs of real-world data collection, learning policies in simulation offers a promising path. Yet, deploying such policies directly in the physical world is hindered by the significant sim-to-real perception gap. Thus, we propose a framework that couples the photorealism of 3D Gaussian Splatting (3DGS) environments with Adversarial Domain Adaptation. By training in high-fidelity simulation while explicitly minimizing feature discrepancy, our method ensures the policy relies on domain-invariant cues. Experimental results demonstrate that our policy achieves robust zero-shot transfer to the physical world, enabling safe and agile flight in unstructured environments with varying illumination.
Reactive Aerobatic Flight via Reinforcement Learning
May 30, 2025Quadrotors have demonstrated remarkable versatility, yet their full aerobatic potential remains largely untapped due to inherent underactuation and the complexity of aggressive maneuvers. Traditional approaches, separating trajectory optimization and tracking control, suffer from tracking inaccuracies, computational latency, and sensitivity to initial conditions, limiting their effectiveness in dynamic, high-agility scenarios. Inspired by recent breakthroughs in data-driven methods, we propose a reinforcement learning-based framework that directly maps drone states and aerobatic intentions to control commands, eliminating modular separation to enable quadrotors to perform end-to-end policy optimization for extreme aerobatic maneuvers. To ensure efficient and stable training, we introduce an automated curriculum learning strategy that dynamically adjusts aerobatic task difficulty. Enabled by domain randomization for robust zero-shot sim-to-real transfer, our approach is validated in demanding real-world experiments, including the first demonstration of a drone autonomously performing continuous inverted flight while reactively navigating a moving gate, showcasing unprecedented agility.
Shape-Adaptive Planning and Control for a Deformable Quadrotor
May 21, 2025Drones have become essential in various applications, but conventional quadrotors face limitations in confined spaces and complex tasks. Deformable drones, which can adapt their shape in real-time, offer a promising solution to overcome these challenges, while also enhancing maneuverability and enabling novel tasks like object grasping. This paper presents a novel approach to autonomous motion planning and control for deformable quadrotors. We introduce a shape-adaptive trajectory planner that incorporates deformation dynamics into path generation, using a scalable kinodynamic A* search to handle deformation parameters in complex environments. The backend spatio-temporal optimization is capable of generating optimally smooth trajectories that incorporate shape deformation. Additionally, we propose an enhanced control strategy that compensates for external forces and torque disturbances, achieving a 37.3\% reduction in trajectory tracking error compared to our previous work. Our approach is validated through simulations and real-world experiments, demonstrating its effectiveness in narrow-gap traversal and multi-modal deformable tasks.
MLKV: Efficiently Scaling up Large Embedding Model Training with Disk-based Key-Value Storage
Apr 02, 2025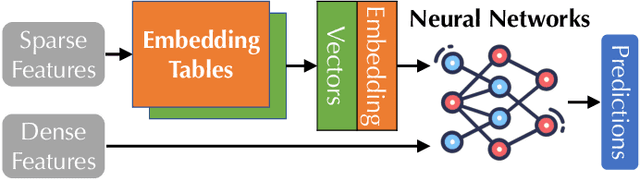
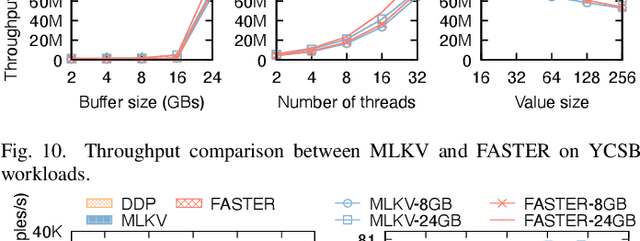
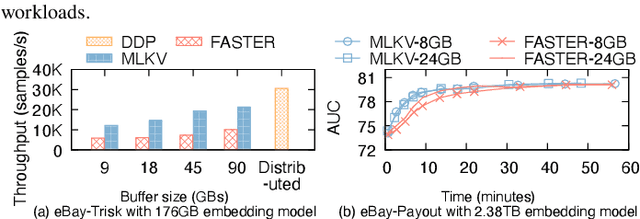
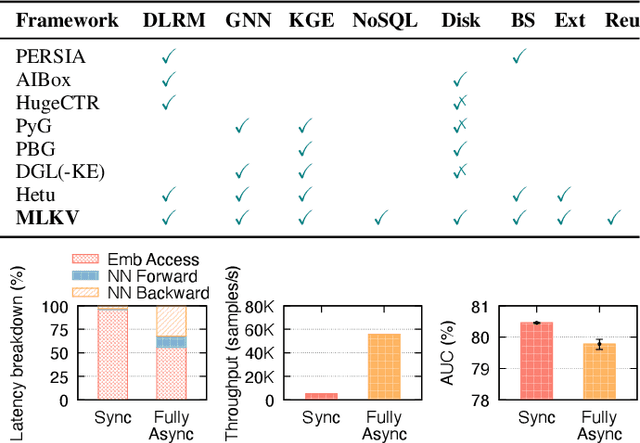
Many modern machine learning (ML) methods rely on embedding models to learn vector representations (embeddings) for a set of entities (embedding tables). As increasingly diverse ML applications utilize embedding models and embedding tables continue to grow in size and number, there has been a surge in the ad-hoc development of specialized frameworks targeted to train large embedding models for specific tasks. Although the scalability issues that arise in different embedding model training tasks are similar, each of these frameworks independently reinvents and customizes storage components for specific tasks, leading to substantial duplicated engineering efforts in both development and deployment. This paper presents MLKV, an efficient, extensible, and reusable data storage framework designed to address the scalability challenges in embedding model training, specifically data stall and staleness. MLKV augments disk-based key-value storage by democratizing optimizations that were previously exclusive to individual specialized frameworks and provides easy-to-use interfaces for embedding model training tasks. Extensive experiments on open-source workloads, as well as applications in eBay's payment transaction risk detection and seller payment risk detection, show that MLKV outperforms offloading strategies built on top of industrial-strength key-value stores by 1.6-12.6x. MLKV is open-source at https://github.com/llm-db/MLKV.
SEB-Naver: A SE(2)-based Local Navigation Framework for Car-like Robots on Uneven Terrain
Mar 05, 2025Autonomous navigation of car-like robots on uneven terrain poses unique challenges compared to flat terrain, particularly in traversability assessment and terrain-associated kinematic modelling for motion planning. This paper introduces SEB-Naver, a novel SE(2)-based local navigation framework designed to overcome these challenges. First, we propose an efficient traversability assessment method for SE(2) grids, leveraging GPU parallel computing to enable real-time updates and maintenance of local maps. Second, inspired by differential flatness, we present an optimization-based trajectory planning method that integrates terrain-associated kinematic models, significantly improving both planning efficiency and trajectory quality. Finally, we unify these components into SEB-Naver, achieving real-time terrain assessment and trajectory optimization. Extensive simulations and real-world experiments demonstrate the effectiveness and efficiency of our approach. The code is at https://github.com/ZJU-FAST-Lab/seb_naver.
Tracailer: An Efficient Trajectory Planner for Tractor-Trailer Vehicles in Unstructured Environments
Feb 27, 2025The tractor-trailer vehicle (robot) consists of a drivable tractor and one or more non-drivable trailers connected via hitches. Compared to typical car-like robots, the addition of trailers provides greater transportation capability. However, this also complicates motion planning due to the robot's complex kinematics, high-dimensional state space, and deformable structure. To efficiently plan safe, time-optimal trajectories that adhere to the kinematic constraints of the robot and address the challenges posed by its unique features, this paper introduces a lightweight, compact, and high-order smooth trajectory representation for tractor-trailer robots. Based on it, we design an efficiently solvable spatio-temporal trajectory optimization problem. To deal with deformable structures, which leads to difficulties in collision avoidance, we fully leverage the collision-free regions of the environment, directly applying deformations to trajectories in continuous space. This approach not requires constructing safe regions from the environment using convex approximations through collision-free seed points before each optimization, avoiding the loss of the solution space, thus reducing the dependency of the optimization on initial values. Moreover, a multi-terminal fast path search algorithm is proposed to generate the initial values for optimization. Extensive simulation experiments demonstrate that our approach achieves several-fold improvements in efficiency compared to existing algorithms, while also ensuring lower curvature and trajectory duration. Real-world experiments involving the transportation, loading and unloading of goods in both indoor and outdoor scenarios further validate the effectiveness of our method. The source code is accessible at https://github.com/ZJU-FAST-Lab/tracailer/.
Universal Trajectory Optimization Framework for Differential-Driven Robot Class
Sep 12, 2024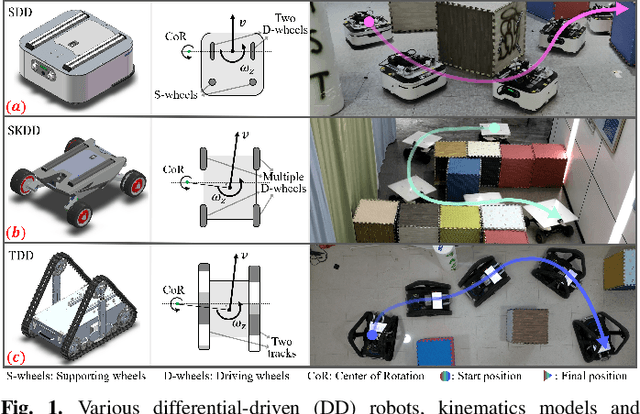
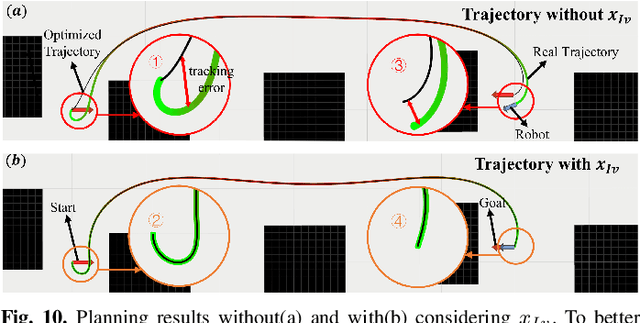
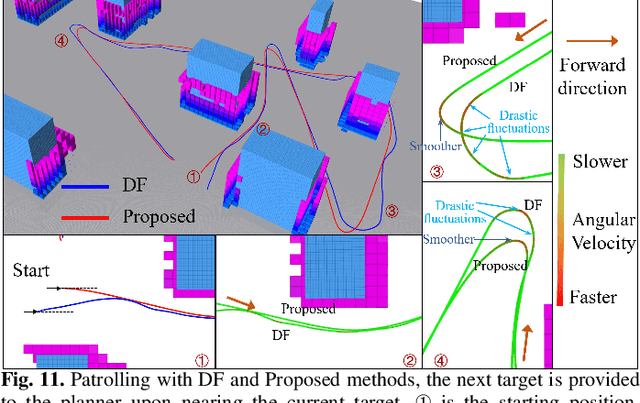
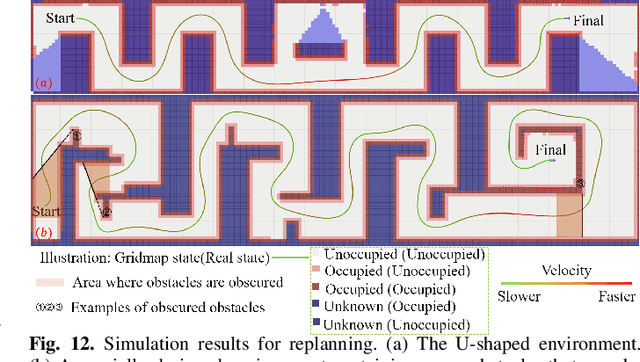
Differential-driven robots are widely used in various scenarios thanks to their straightforward principle, from household service robots to disaster response field robots. There are several different types of deriving mechanisms considering the real-world applications, including two-wheeled, four-wheeled skid-steering, tracked robots, etc. The differences in the driving mechanism usually require specific kinematic modeling when precise controlling is desired. Furthermore, the nonholonomic dynamics and possible lateral slip lead to different degrees of difficulty in getting feasible and high-quality trajectories. Therefore, a comprehensive trajectory optimization framework to compute trajectories efficiently for various kinds of differential-driven robots is highly desirable. In this paper, we propose a universal trajectory optimization framework that can be applied to differential-driven robot class, enabling the generation of high-quality trajectories within a restricted computational timeframe. We introduce a novel trajectory representation based on polynomial parameterization of motion states or their integrals, such as angular and linear velocities, that inherently matching robots' motion to the control principle for differential-driven robot class. The trajectory optimization problem is formulated to minimize complexity while prioritizing safety and operational efficiency. We then build a full-stack autonomous planning and control system to show the feasibility and robustness. We conduct extensive simulations and real-world testing in crowded environments with three kinds of differential-driven robots to validate the effectiveness of our approach. We will release our method as an open-source package.
Retrofitting Temporal Graph Neural Networks with Transformer
Sep 10, 2024



Temporal graph neural networks (TGNNs) outperform regular GNNs by incorporating time information into graph-based operations. However, TGNNs adopt specialized models (e.g., TGN, TGAT, and APAN ) and require tailored training frameworks (e.g., TGL and ETC). In this paper, we propose TF-TGN, which uses Transformer decoder as the backbone model for TGNN to enjoy Transformer's codebase for efficient training. In particular, Transformer achieves tremendous success for language modeling, and thus the community developed high-performance kernels (e.g., flash-attention and memory-efficient attention) and efficient distributed training schemes (e.g., PyTorch FSDP, DeepSpeed, and Megatron-LM). We observe that TGNN resembles language modeling, i.e., the message aggregation operation between chronologically occurring nodes and their temporal neighbors in TGNNs can be structured as sequence modeling. Beside this similarity, we also incorporate a series of algorithm designs including suffix infilling, temporal graph attention with self-loop, and causal masking self-attention to make TF-TGN work. During training, existing systems are slow in transforming the graph topology and conducting graph sampling. As such, we propose methods to parallelize the CSR format conversion and graph sampling. We also adapt Transformer codebase to train TF-TGN efficiently with multiple GPUs. We experiment with 9 graphs and compare with 2 state-of-the-art TGNN training frameworks. The results show that TF-TGN can accelerate training by over 2.20 while providing comparable or even superior accuracy to existing SOTA TGNNs. TF-TGN is available at https://github.com/qianghuangwhu/TF-TGN.
Learning Physics-Consistent Material Behavior Without Prior Knowledge
Jul 25, 2024



Accurately modeling the mechanical behavior of materials is crucial for numerous engineering applications. The quality of these models depends directly on the accuracy of the constitutive law that defines the stress-strain relation. Discovering these constitutive material laws remains a significant challenge, in particular when only material deformation data is available. To address this challenge, unsupervised machine learning methods have been proposed. However, existing approaches have several limitations: they either fail to ensure that the learned constitutive relations are consistent with physical principles, or they rely on a predefined library of constitutive relations or manually crafted input features. These dependencies require significant expertise and specialized domain knowledge. Here, we introduce a machine learning approach called uLED, which overcomes the limitations by using the input convex neural network (ICNN) as the surrogate constitutive model. We improve the optimization strategy for training ICNN, allowing it to be trained end-to-end using direct strain invariants as input across various materials. Furthermore, we utilize the nodal force equilibrium at the internal domain as the training objective, which enables us to learn the constitutive relation solely from temporal displacement recordings. We validate the effectiveness of the proposed method on a diverse range of material laws. We demonstrate that it is robust to a significant level of noise and that it converges to the ground truth with increasing data resolution. We also show that the model can be effectively trained using a displacement field from a subdomain of the test specimen and that the learned constitutive relation from one material sample is transferable to other samples with different geometries. The developed methodology provides an effective tool for discovering constitutive relations.